

































The Deep Sea Systems, Inc. Global Explorer ROV returns from a dive deep below the Arctic ice. The Global Explorer is configured to capture specimens using two methods: detritus samplers (cylindrical containers with sliding covers on the bottom, front portion of the ROV) or a suction device (on the center, left side of the ROV). Click image for larger view.
Capturing Creatures in the Deep
July 23, 2005
Joe Caba
ROV Pilot
The adventure of going someplace you have never been before is always exciting, whether it be a different part of town, a new country, or deep down into the ocean. Of course going deep into the ocean using the eyes and ears of a Remotely Operated Vehicle (ROV) always provides a new experience to me. Our recent dives in the Artic also provide new information to scientists working to build our knowledge of these deep reaches harboring organisms and geologic areas that have yet to be discovered and explored. As one scientist points out, ‘99 percent of the inhabited Earth is ocean.’ It is exciting to support their efforts.
The goal of today’s dive was to collect information and specimens living in the water column (as opposed to the sea floor). The ROV dove 2450 meters (1.5 miles) below the Artic ice. We had practically completed the day’s work looking for mid-water organisms, and were in the initial stages of recovering the vehicle from the bottom when we came across an octopus.After video taping it for a few minutes, the decision was made to collect it for further scientific analysis.

ROV pilot, Joe Caba, remotely operates the ROV from the ROV control room on board the ship. A variety of monitors are set up in the control room to show live video feed from the ROV and additional information about the ROV's depth, location and environment. Click image for larger view.
The Global Explorer ROV is configured to capture specimens using two methods: detritus samplers or a suction device. Detritus samplers (or D-samplers) consist of an open ended, vertical, clear plastic tube (like a coffee can without the ends) and horizontally sliding (guillotine type) doors. They are the scientist's preferred method of capture because the ROV is maneuvered over an organism and then lowered (via vertical thrust) so that the D-Sampler tube is gently lowered around the organism. The doors are then closed without disturbing the creature. The second method is a suction device (like a vacuum). The ROV is driven up to the target with the suction 'on,' trying to suck in the organism. Water flow around the suction device can cause great stress the organism we are trying to collect, however the stress generally is not detrimental to hardier organisms.
As is normally the case, it is easier to say, “let’s collect that,” than it is to actually collect it. Our current difficulty was that the ROV was at the end of its 45 meter (~150 ft) leash to the 300 lb 'clump' weight, and the USCG Cutter Healy was drifting with the pack ice at two tenths of a knot … away from were we wanted to be – by the octopus. The octopus had no intention of following our drift. It continually meandered away despite our heavy pursuit. To mediate the situation, we were able to pull the clump weight around a little bit by the 8000-foot cable it hangs on from the surface.
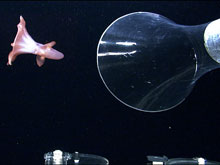
The ROV’s suction device is on as it makes an approach to capture “Oliver,” an octopus floating just a few feet away. Click image for larger view.

Success! After some impressive maneuvering of the ROV and a long chase, the octopus is captured using the suction device! Click image for larger view.
We tried to catch the Octopus with the D-Sampler. Despite all efforts, we just didn't have the maneuverability available because we were dragging around a 300 lb clump weight. We were operating at the edge of the ROV’s performance envelope. We pursued the octopus and tried to capture it for 10 minutes before it was suggested that we give up. I knew the possibility of collecting the creature was limited, but was not ready to give up. We continued trying to collect the octopus using the D-Samplers with no success other than tiring-out and running into the poor fellow. One of our primary problems lay in not having any more down thrust (due to our tight leash) to get the D-sampler down over the octopus.
We switched to the suction sampler and continued pursuit for about ten more minutes with many close calls. The ROV video feed was playing live on TV screens around the ship and the main cafeteria. Crew, media and scientists on board were sitting on the edge of their seats groaning each time we nearly captured the octopus and missed, until finally … we got it! Cheers erupted and word spread quickly! All aboard were quite happy (with just the video alone), and very happy with the collection. I hope this critter can teach us some new things.
After recovering the ROV and its precious cargo on the surface, “Oliver” was placed in a deep ocean water tank in a cold room... still alive. I can only wonder what we will see next?
Sign up for the Ocean Explorer E-mail Update List.