

















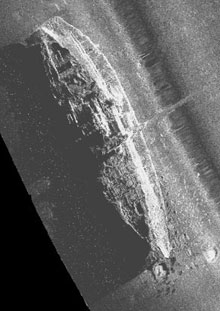
A sidescan sonar image of the steamship Portland. Photo courtesy of NOAA/NURC-UConn. Click image for larger view.
Flying the Fish
Sept. 13, 2003
Allen Gontz
Technical Specialist
University of Maine
Today, Day 1 of the Portland mission, we put the fish in the water. By "fish" we mean the towed sidescan sonar -- a piece of equipment that uses sound to create images of the sea floor (sort of like aerial photography except using sound instead of light).
This image of the Portland is displayed in true geographic orientation with north up. The image was taken today with the research vessel Connecticut’s EdgeTech DF1000 digital sidescan sonar.
Usually, the initial stage of a research mission involves a shakedown day or two in which equipment and computer software are tested. Our day was no different. While the ROV (remotely operated vehicle) technicians fine tuned the controls for the thrusters, lights and high-definition television camera, the sidescan sonar was deployed at three different targets to get baseline data for the mission. The first target was the steamship Portland, followed by a small, unidentified fishing vessel, and the wreck site of the Palmer and the Crary, two century-old coal carriers.
Based on recent developments in image processing and GIS (geographic information systems), we will be using the sidescan images in a novel way. Not only will they be used as digital records of the status of the wreck site, they also will become the basis for a mapping and tracking system that is referenced to the real world. For each data point, or pixel, on the image, a computer software program assigns a geographic location on the Earth. After processing this data into a “map,” we’ll be able to overlay the real-time track of the ROV. This juxtaposition allows the ROV pilot to “fly” the vehicle around and over the wrecks with an added degree of accuracy and safety. This accuracy is critical because of the high risk of entanglement in ghost fishing nets that festoon the wreck.
Other researchers have used this technology to create mosaics of shipwrecks and to map sea-floor habitats, but this may be the first time anyone has married real-time ROV tracking with georeferenced images of shipwrecks. As the mission continues, the team will return to these sites to take close-up, high-definition video of the wrecks.

A team from the Discovery Science Channel captures sidescan sonar deployment at the wreck of the Portland. Photo by Anne Smrcina, Stellwagen Bank National Marine Sanctuary Click image for larger view.
Reports from Three Wrecks
Ben Cowie-Haskell
Operations Coordinator
Stellwagen Bank National Marine Sanctuary
Principal Investigator, Portland Expedition
Portland
Our first destination after leaving Gloucester, MA (our home port for the mission), was the final resting place of the Steamship Portland, where we made several passes over the site, both parallel and perpendicular to the wreck. We obtained a fantastic image that came from a pass that went directly over the vessel, showing the smokestacks, A-frame, walking beam, forward stairwell, snagged fishing gear, and part of the debris field.
Unknown Vessel
At only 50 ft long, this vessel is a lot smaller than the other targets and created a few problems in our initial attempts to obtain appropriate imagery. High relief in the stern could be a wheelhouse, and a rise to the bow appears to be characteristic of traditional eastern-rigged trawlers. We plan to test the ROV here because the wreck has few entangling nets or other snags that could potentially harm the vehicle.
Palmer-Crary
We’re getting really good at pinpointing our wrecks. We “split” this wreck site right down the middle (figuratively, not literally). Our sonar flew directly over the area between the two ships. This is both good and bad. Bad, in that part of each ship was obscured by shadowing between the vessels, but good in that we were able to get a very clear picture of the status of both ships. We can see masts, entangled fishing gear, and other structures creating vertical relief. On a subsequent pass, we crossed perpendicular to and amidship of the bow, providing an excellent image of the impact area where the two ships collided before they sank 101 yrs ago.