















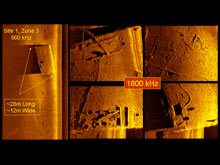
Figure 1. This target found in Area 1 may be a barge, but its identification has not been verified. The images were generated by a REMUS 100 SW AUV with a dual-frequency sidescan sonar. One image (far left) shows the entire target captured by the 900-kHz sonar. Other detailed images (to the right) — showing hatches, cable, and other objects — were generated by the 1800-kHz sonar. Click image for larger view and image credit.

Figure 2. An MMP REMUS 100 discovered this lost torpedo on the Naval Underwater Warfare Center test range. Investigators will examine this and other possible torpedoes in the future. Click image for larger view and image credit.
Mission Summary
May 23, 2008
Frank Cantelas
Maritime Archaeology Program Officer
NOAA’s Office of Ocean Exploration and Research
After a year of planning and two weeks of operations, AUVfest 2008 was obviously a great success. NOAA’s collaboration with the Office of Naval Research (ONR) to sponsor the demonstration grew into many partnerships, highlighting the theme, “Partnership Runs Deep.” During AUVfest's two-week run the mission's participants developed many partnerships: between maritime archaeologists and autonomous underwater vehicle (AUV) technologists, and between the various organizations involved. NOAA’s primary mission for AUVfest was to provide an avenue for public outreach and education. This included the participation of archaeologists in field operations; a workshop for archaeologists and AUV technologists, which was held at the University of Rhode Island; extensive coverage on the Ocean Explorer Web site, which you are looking at right now; the development of educational products for the Web site; and support for a film documentary. We accomplished all these goals.
Out of the 12 AUVs participating, eight were used on archaeological sites. Weather and technical problems impacted some of the surveys, but given the nature of using advanced technology under water, this was expected. Our work focused on four shipwrecks and the unexplored Naval Undersea Warfare Center (NUWC) test range. AUV systems were generally delegated to sites where they could collect useful data given the types of sensors they carried. Although we completed missions on all of the sites, there never seems to be enough time to accomplish everything. Some sites received more attention than others based on our goals and logistics. Below is a discussion of what we found, along with images of some of the data.
Site 1: NUWC North Test Range
In the years following the Civil War, the Navy built a torpedo station on Goat Island (which is adjacent to the NUWC shore facility) to develop the torpedo as a weapon for undersea warfare. The NUWC test range stretches north from Goat Island and is still used to test undersea vehicles. Little is known about what lies on the bottom of the range, but it likely contains torpedoes and related equipment that are significant to the history of undersea warfare. We made several important discoveries on the test range with the REMUS 100 SW AUVs, using dual-frequency sidescan sonar. These include one torpedo, possibly several others, and a vessel that appears to be a metal barge (figures 1 and 2). All of these sites were unknown prior to AUVfest.
Sites 2 and 3: Prudence Island Wreck and Wooden Barge
These two wrecks lie just a few hundred meters apart off Prudence Island. Site 2, the Prudence Island wreck, is a 20th-century vessel constructed of steel and measuring roughly 120 feet in length. It was discovered by the NOAA ship Rude in 2004, and we know little about it today. Site 3 is a wooden barge, measuring roughly 120 feet in length, which probably dates to the first half of the 20th century. Both sites rise high above the bottom in about 60 feet of water.
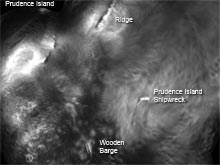
Figure 3. This image was captured by iPUMA, a wide-swath forward-looking sonar used to identify possible targets. Here we see the two wrecks off Prudence Island, as well as features on the surrounding sea floor. To get a sense of scale, consider that the wooden barge is 120 feet long. Click image for larger view and image credit.
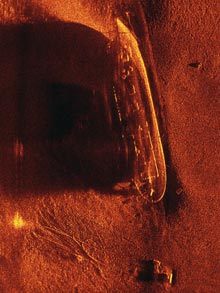
Figure 5. The SAS-12 image shows a number of features on the Prudence Island shipwreck and great detail on the surrounding bottom. Note the anchor just below the ship’s stern and the chain for the marker buoy (on the left). Click image for larger view and image credit.
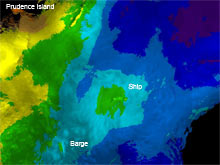
Figure 4. Data collected by iPUMA can be processed into bathymetric (depth) charts. This chart shows the bathymetry of the area around the wrecks off Prudence Island.Click image for larger view and image credit.
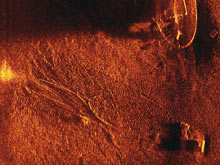
Figure 6. A SAS-12 close-up view of the Prudence Island wreck reveals several details on the vessel’s deck and a lobster trap (on the left). The most prominent features are the drag marks, which were made by the chain holding a marker buoy. Individual links on the chain appear as dots leading to the surface buoy, which is the lighter hazy area (to the left). Click image for larger view and image credit.
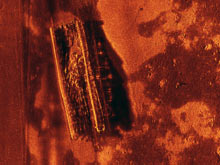
Figure 7. SAS-12 captured this image of the wooden barge near Prudence Island. Divers have confirmed the presence of rock, machinery, and other debris inside. Click image for larger view and image credit.
Several AUVs surveyed the two wrecks using different types of sensors. The iPUMA is a wide-swath forward-looking sonar, which has great potential for the scientific community because it can cover such a broad area. While the iPUMA does not provide high resolution images, it quickly distinguishes targets, even small targets, over a wide area. Data from iPUMA was able to depict the geographical context of the Prudence Island sites and surrounding bottom features (figure 3). This data can also be displayed as 3D bathymetry to show the wrecks and submerged landscape (figure 4).
Synthetic aperture sonar on the SAS-12 provided phenomenal clarity on both wrecks. This system has a fairly wide swath coverage and provided extremely high resolution. If you look closely at the image of the Prudence Island wreck, you'll notice an anchor for a marker buoy (figure 5). Drag marks from the anchor chain mark the bottom, and by zooming-in you can see individual links on the anchor chain (figure 6). Similar detail can be seen in the image of the wooden barge (figure 7).
Site 4: HMS Cerberus
Four British frigates — Cerberus, Juno, Lark, and Orpheus — were trapped in Narragansett Bay in August 1778, when a French naval squadron came to assist American forces during the Revolutionary War. The British decided to destroy their vessels rather than turn them over to the French. The HMS Cerberus was run aground and burned to avoid capture. Built in 1758, Cerberus measured 118 feet on deck and carried 28 guns. Today, the site is partially buried.
Many of us were interested to see what the AUVs could discover on this site. Although it has been the subject of much research, little is known about what lies beneath the sediment at this site. The best vehicle for investigating the Cerberus is the BOSS, which combines a camera, gradiometer (to locate ferrous metal), and a bottom object scanning sonar (BOSS) that can image buried objects. For analysis, all this data can be fused together and graphically overlaid to see correlations between the sensors — a perfect tool for any archaeologist investigating an old shipwreck. Should BOSS ever make it to the commercial market, archaeologists could use it to “see” below the bottom. They could undertake fewer excavations, which are very expensive, and really target areas that should be excavated.
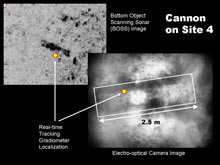
Figure 8. On the HMS Cerberus Site 4, a Bluefin 12 BOSS AUV used three sensors (an electro-optical camera, gradiometer, and bottom object scanning sonar) to detect a partially buried cannon. These images show how data from the three sensors are combined to corroborate a target location. Click image for larger view and image credit.
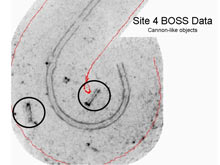
Figure 9. On another part of the Cerberus site, the Bluefin 12 BOSS AUV detected two more buried objects that appear similar to the other cannons found on the shipwreck. Click image for larger view and image credit.
BOSS collected data from known areas of the site and may have found previously undiscovered portions of the wreck. In one image, a partially buried cannon can be seen in a photograph which is also located by the magnetic gradiometer and imaged by the BOSS (figure 8). In another image, we can see two cannon-like objects that are similar in size and magnetic signature to the known cannon (figure 9). Three-dimensional models of these objects also appear very cannon-like, but we will have to wait until archaeologists can verify their identity before we know for sure (figure 10).
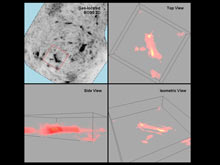
Figure 10. BOSS data from one of the cannon-like objects, processed into a voxel (a three-dimensional model) suggests the target has a long cylindrical shape. The size is similar to another known cannon from the Cerberus. Click image for larger view and image credit.
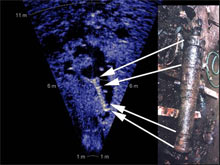
Figure 11. Transphibian used forward-looking sonar to image portions of the Cerberus site. This illustration compares reinforcing bands on a cannon currently on the site with one previously recovered (shown on the right). Click image for larger view and image credit.
Transphibian also spent time on the Cerberus with its forward-looking sonar. This unique vehicle is propelled by flippers and can be operated autonomously or by an operator. Transphibian provided an excellent image of a cannon (figure 11).
Site 8: HMS Lark
As French ships approached, the commander of the HMS Lark ordered his frigate set afire to avoid capture. The frigate suffered a violent explosion, scattering material over a wide area. Today, the remains of the Lark are almost completely buried under sediment. Located several miles north of the main survey areas, the Lark did not receive as much attention as the other sites. The MMP REMUS vehicles completed sidescan sonar runs and found the area to have a flat silty bottom with only a few rocks sticking up. iPUMA made a pass over the site and did not find any significant targets. Given that the Lark is buried, BOSS and LSG buried mine hunting systems would have been effective tools, but they did not have the opportunity to collect data. We’ll just have to wait for another chance to visit this site.
A Final Word . . .
In many ways, AUVfest 2008 was an experiment with numerous objectives. Among them was to see if the AUVs could work successfully on archaeological missions, to incorporate archaeologists on AUV technology teams, and to see if NOAA, ONR, and NUWC could work together in a technology demonstration with a wide range of goals.
Overall it seems that we accomplished our various missions. In particular, AUVfest 2008 created an excellent opportunity for maritime archaeologists to collaborate with AUV technologists. Putting the archaeologists on the technology teams during field operations and hosting a workshop to discuss the results created a valuable dialog between the two groups. The maritime archaeologists now have a knowledge base on which to plan the use of AUVs in their own research and connections within the AUV community to help them accomplish their work.
The success of AUVfest demonstrates that there is great value in leveraging these systems for dual use. It increases the value of the public’s investment and greatly expands the scope of scientific research for the benefit of all. This demonstration focused on maritime archaeology, but dual-use applications are obvious for many ocean sciences. The AUVs and their sensors are cutting-edge technology. Making them available to other scientists will likely lead to significant discoveries and scientific advancement.