
















The AUVfest 2008 expedition used the torpedo weapons recovery vessel, or TWR-841, for hauling and launching AUVs. The vessel has an A-frame on the back, which can hoist large AUVs, like the 550-pound battlespace preparation autonomous underwater vehicle (BPAUV). An inflatable boat works with the TWR-841, launching the small AUVs, or “fish.” Click image for larger view and image credit.

The BPAUV, or Nemo, is brought back to the TWR-841 vessel by the small support boat. The crew on the small boat will help connect Nemo to the A-frame that will hoist it onboard. Click image for larger view and image credit.

The BPAUV and two REMUS 100s sit onboard the TWR-841. Both systems have been nicknamed — the BPAUV is called Nemo, because it was lost for several months and then recovered, and the REMUS 100s are called "fish," because they are so much smaller than the other vehicles. Click image for larger view and image credit.
AUVfest on the Water: Navy Reservists’ Perspectives
May 12 - 17, 2008
![]() View a video of the BPAUV being deployed from the TWR-841 A-frame.
(Quicktime, 3.1 Mb.)
View a video of the BPAUV being deployed from the TWR-841 A-frame.
(Quicktime, 3.1 Mb.)
Onboard all the vessels this week are Navy reservists, who act as the safety leads for each of the missions. The reservists came to Newport, Rhode Island, from other places to serve this detail. What follows are accounts from the week from three reservists. Some have expanded their normal logs to provide their perspectives, but even the most straightforward logs record the daily surprises that occur during the missions.
May 12, 2008
LTJG Chris Anastasiou
Reserve Mine Warfare Directorate
Navy Meteorology and Oceanography Command
Stennis Space Center, Mississippi
All last week, the crew of the torpedo weapons recovery vessel, TWR- 841, were conducting marine archaeological operations in Narragansett Bay. This week our mission objective is hunting mines, or at least mine-like objects placed underwater by the Naval Undersea Warfare Center here in Newport, Rhode Island. Our job is to find and classify them using autonomous underwater vehicles (AUV). Think of it as a high-tech Easter egg hunt. But it’s not all fun and games; what we learn out here will be an important step in making the world’s waterways safer.
Today’s weather is not looking good. The Navy Meteorology and Oceanography Command (METOC) forecast calls for high winds with gusts of 40 mph and a good chance of rain. The National Weather Service has issued a gale warning for the entire area. It will be a good test of AUV operations in less-than-ideal conditions.
0600 We report for systems testing and mission planning. One of our systems is a high-frequency ground wave radio that transmits AUV data to onshore technicians so they can track and monitor our progress.
0714 TWR-841 leaves Stillwater Basin dock for Site 1, Zone 3. Seas are already choppy and the air temperature is chilly 49º F.
0904 We launch two small REMUS 100 vehicles from our dive boat — one of two support vessels that, together with the TWR-84, make up Support Group 1. The next step is to launch the larger vehicle BPAUV, affectionately known as Nemo because it was lost at sea for about three months before being recovered.
1000 Nemo is much larger than the REMUS 100 and requires the use of the ship’s winch and A-frame for deployment. In these rough seas, launching Nemo is a challenge, but the vehicle splashes and makes its way toward its area of operation. Meanwhile, the two REMUS "fish" are well into their survey missions.
1115 The weather conditions are deteriorating, with wind gusts of 51 mph reported on the ship’s bridge. Seas are running about 4-to-5 feet. The test director has decided to terminate the mission and get the "fish" back on the boat. TWR-841 is heading home.
1230 The REMUS 100 vehicles are back on the 841. Now it’s time to get Nemo. The weather continues to deteriorate as the small inflatable support boat gets in position to capture Nemo. The next step is to attach Nemo to the 841’s A-frame. Despite the high winds and rough seas, the Navy AUV detachment gets Nemo back on board safely. Once Nemo is secure, TWR-841 is returning to base.
1345 Back at Stillwater Basin, the REMUS 100 and BPAUV personnel download the data from the vehicles and begin doing the post mission analysis. They identify many mine-like objects and one unexpected discovery. One of the REMUS "fish" found a very large rectangular object about 30 meters in length and several meters off the bottom. We will return to this site Friday to get a closer look at this object and several other interesting finds using REMUS 100’s high-resolution sonar sensors.
May 15, 2008
Summary Logs from the SSAM-REMUS 600 mission
0530 Beautiful day and nice weather expected with winds 5 to 7 mph. No rain or foul weather expected in the way of big waves or high winds. Crew of nine on the 35-foot WB-30 boat. Sunrise was at 0522ES, with partly cloudy skies.
0535 Assistant safety range officer (ASRO) AG1 Steven A. Hayes established the communications that allow the flow of information that is paramount to the tracking of the small synthetic aperture minehunter (SSAM) AUV and WB-30 boat used on this mission. Using a port router, we send messages every 30 seconds to the communications office, specifically the Conex Box there. Chris Duarte and Tom Lee are verifying the messages are being received.
0714 SSAM is in the water at Stillwater Basin, lifted from the pier by the crane. It will navigate to Site 4. We are leaving on the WB-30 to head to Site 4, as well. The travel speed of the AUV is 4 knots, at a depth of 6 meters. The SSAM will transmit data on turns between the tracks while at Site 4, with data transmits every 30 seconds.
0720 Tom Lee called to verify that I am receiving messages from SSAM and properly transmitting this information to the Conex Box.

0835 We reach Site 4.
0847 SSAM surfaces for a GPS "fix." This is done periodically for purposes of accuracy of AUV location. This is routine.
0857 SSAM continues underwater and will run two test tracks, using an east-to-west path in Site 4.
0915 The messages that will be transmitted will occur only during turns, between the tracks. I call Conex, speak to Chris Duarte, and inform her of this.
0919 SSAM resurfaces and the techs and engineers reprogram the unit for the official mission.
0926 The SSAM dove and the mission is underway. It will travel 3 meters from surface at approximately 4 knots for about 2 hours.
1036 Four tracks are completed, with four to go. Speed of AUV is 3 to 3 ½ knots.
1120 SSAM resurfaces unintentionally. Techs are attempting to get SSAM to dive. Standby.
1123 Engineer Tom Austin attempts unsuccessfully to get SSAM to dive. We will have to go by it to see if we can find out what’s wrong.
1127 While SSAM is on the surface, Austin visually confirms that it has lost both its two front forward fins. It may have run into something, but they are not sure what. Mission is aborted until further notice.
1135 We call for assistance from shore for repairs, so SSAM can finish its mission. Engineer Greg Packard is traveling out from Stillwater Basin to examine SSAM.
1145 We report the current situation to Conex technician Chris Duarte.
1156 Greg Packard arrives and begins repairing SSAM.
1205 Greg Packard has boarded our WB-30 boat. A test will be done on SSAM to ensure the mission’s success. Tom Austin is reprogramming SSAM.
1227 SSAM is back underwater and six tracks remaining. We have about one hour left, with an additional one-hour transit back to Stillwater Basin. Estimated time of arrival is 1430.
1245 Send update to Conex Box and Chris Duarte.
1315 SSAM is down to 8% battery power. Tom Austin makes the official call to cut the mission short.
1325 SSAM has resurfaced for the final time due. SSAM is towed back to basin via 8906 boat. Estimated time of arrival is 1415L.
1415L All records/files are downloaded to 80GB portable hard drive.
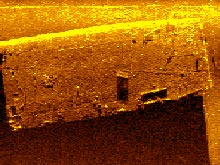
Several unexpected objects, including this 30-meter-long barge, were found during AUVfest. Although this image might look like a photograph, it’s actually created from sound waves produced by a sidescan sonar onboard the REMUS 100 “fish.” Click image for larger view and image credit.
May 16, 2008
AG1 Steven A. Hayes
Assistant Safety Range Officer
United States Navy
Today is Day 5 of the exercises of AUVfest 2008 here on Narragansett Bay. The weather is nice enough for our crew of 10 – nine men and one woman. We are a mix of engineers, technicians, archaeologists, government employees and two official ship crew, one of them the captain. Research here is the main priority of most of the people I'm working with here for 20-plus days, and I'm one of few in uniform.
On Tuesday, winds on the bay were gusting to 51 knots and that day's activities were halted due to the weather. When it’s not windy and the seas are not too rough, we head out. It’s much better weather than earlier this week, when sea sickness was prevalent, and half the crew, myself included, was topside, hugging the steel rails just to keep our bearings and not get sick.
Most mornings I report at 0530, but today I arrived at 0633. When the workday can last in excess of 15 hours, reporting an hour later in the morning can really make the difference. Today’s mission is not all that different than the others of the past week. We will be taking out the iPUMA REMUS 600. This mission will have a length of about 4 to 5 hours. We are set to travel on a 35-foot WB-30 boat at about 4 knots, so we can keep a close eye on our AUV, which will also be traveling 4 knots.
The majority of the mission is simple, with the AUV being preprogrammed by the techs and engineers prior to our departure from Stillwater Basin. None of the crew expects anything out of the norm.
Today, I have a much more sense of worth and accomplishment towards the mission's overall success. This is truly one overall exceptional event that is taking place, with thousands of dollars and man hours being invested to make it a success. We have archaeologists — both onboard our ships and ashore — collecting data from the missions. Their presence has given me a chance to open my mind to the continuous workings of the Navy and how we work alongside others to achieve goals.
At 1235, we are back at “home base” — Stillwater Basin on NUWC’s campus. Things went well for the mission, with no surprises.