

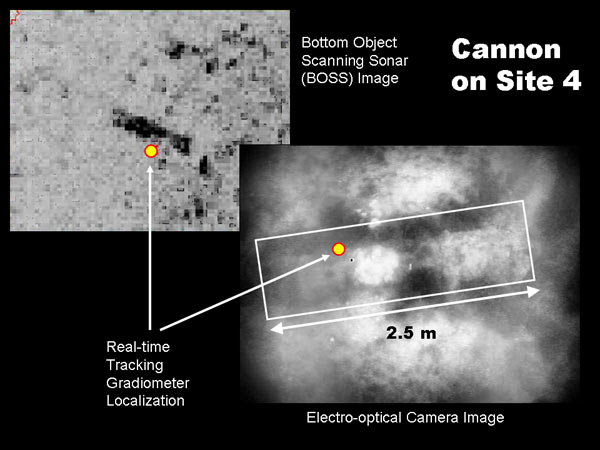
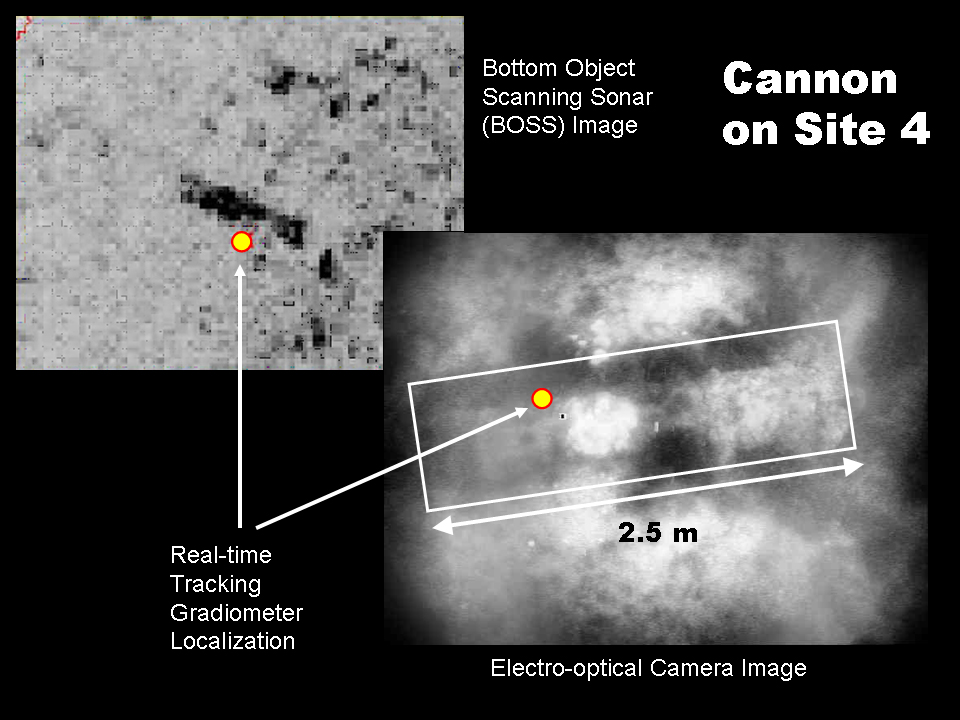
Figure 8. On the HMS Cerberus Site 4, a Bluefin 12 BOSS AUV used three sensors (an electro-optical camera, gradiometer, and bottom object scanning sonar) to detect a partially buried cannon. These images show how data from the three sensors are combined to corroborate a target location. Image courtesy of AUVfest 2008: Partnership Runs Deep, Navy/NOAA, OceanExplorer.noaa.gov.
{kind=link}