|
 Video Video
|
 |
|
 |
|
 |
|
 |
|
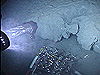
Surprisingly, bubbles composed of some sort of fluid were rising out of the sediment around the chimneys.
|
|
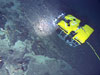
See how the ROPOS ROV is deployed at the Maug Island volcanic crater.
|
|
Collecting an unusual species of shrimp found at the hydrothermal vent.
|
|
A few swarms of crabs, scavenging on some dead fish.
|
|
|
|
 |
|
|
|
 |
|
 |
|
 |
|
 |
|
August 18
See how the claw and arm of Alvin are able to sample a “wedge” of pillow basalt pulled from a fractured pillow lava.
|
|
View the peeper recovery and sampling process.
|
|
Deploying the Eye-in-the-Sea (EITS) on the edge of a brine pool, at over 2,100 ft.
|
|
The Johnson-Sea-Link II manipulator arm picks up a coral skeleton.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
 View a slide show of the Young Modified Van Veen Grab sampler in action. View a slide show of the Young Modified Van Veen Grab sampler in action.
|
|
Collecting a sponge community with the Chimneymaster.
|
|
Slideshow of Alvin recovery from dive 3909.
|
|
The ascent of a dive on the southern Lophelia shelf.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Deployment and descent of the Johnson-Sea-Link II.
|
|
Manipulator arm retrieving carrion bucket.
|
|
Forcepia, not just your ordinary sponge.
|
|
The Innovator ROV being launched from the stern deck of the NOAA Research Vessel Ronald H. Brown.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The diversity of marine life hidden beneath oil platforms.
|
|
Scientist use sampling techniques that have minimal impact on the Northern Gulf of Mexico Deep Water Habitats.
|
|
Under-ice dives.
|
|
Divers under the ice.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
S1st launch of ROV Global Explorer.
|
|
The Atlantis gets ready to explore the Galapagos Rift.
|
|
Collecting a fish sample.
|
|
Video footage taken from the remotely operated vehicle.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The advantages of an ROV.
|
|
Collecting a crab sample.
|
|
Alvin collecting volcanic rock.
|
|
Two different sampling techniques used by the submersible.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Video of a "live rock specimen" being collected.
|
|
Video of a sponge being collected.
|
|
Video of an Otter trawl deployment.
|
|
The R/V Seward Johnson being prepared for the expedition.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Footage captured by the Johnson-Sea-Link II.
|
|
The Johnson-Sea-Link II deploying traps.
|
|
The Johnson-Sea-Link II sampling benthic invertebrates.
|
|
The Johnson Sea-Link being deployed for a dive.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Alvin collecting a suction sample
|
|
Van Dover mussel pot being deployed
|
|
Van Dover mussel pot retrieving invertebrates
|
|
Deployment of PAMS, an acoustic array
|
|
|
|
|
|
|
|
|
Images
|
|
|
|
|
|
|
|
|
Vessels
|
 |
|
 |
|
 |
|
 |
|
The R/V Thomas G. Thompson holds its station over Maug caldera.
|
|
NOAA ship Ronald H. Brown during mobilization in Woods Hole, Mass.
|
|
WHOI R/V Atlantis refueling in Woods Hole between cruises.
|
|
The NOAA Ship Ronald H. Brown docked at the Port of Panama City, Florida. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Small boat launched from the Ron Brown. (HR)
|
|
Media reps, visiting the R/V Seward Johnson.
|
|
The Thompson surrounded by Maug's three islands (HR)
|
|
The tugboat that brought the new science party. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
R/V Atlantis docked.
|
|
The Louis St. Laurent.
|
|
Preparing to explore.
|
|
Stern-view of the Louis St. Laurent.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Louis at sunset.
|
|
The crew and science party prepare the ship.
|
|
The R/V Seward Johnson at sunrise on the first morning of IIS 2002.
|
|
R/V Atlantis
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
R/V Lake Guardian
|
|
Rear view of R/V Atlantis
|
|
NOAA Ship Gordon Gunter
|
|
NOAA Ship Ronald H. Brown
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
NOAA Ship Ferrel
|
|
R/V Seward Johnson II
|
|
NOAA Ship McArthur
|
|
The Auriga
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
R/V Cape Fear
|
|
USS Grasp
|
|
USS Grapple
|
|
USS Grapple moored to buoy
|
|
|
|
|
|
|
|
 |
|
 |
|
|
|
|
|
Boom and small launch
|
|
Various launches
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Submersibles
|
 |
|
 |
|
 |
|
 |
|
Schematic diagram of the DSV Alvin. (HR)
|
|
The Alvin's claw and arm, grasping a “wedge” of pillow basalt. (HR)
|
|
To make fluorescent observations, the Johnson-Sea-Link is modified by placing blue filters on the submersible’s two 400W HMI lamps. (HR)
|
|
The mechanical arm of the Johnson-Sea-Link places a baited benthic trap on the seafloor, just outside the brine pool.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Alvin’s manipulators collecting a rock at the Cape Fear Diapir.
|
|
The biobox on the front of Alvin.
|
|
Recovering the Alvin sub after a dive on Manning Seamount. (HR)
|
|
Alvin being pulled out of the water during a dive recovery.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Launching Alvin from Atlantis.
|
|
Alvin, up close, in its hanger on board Atlantis.
|
|
The DSV Alvin crew readies the sub for a dive.
|
|
View from inside the ‘bubble’ of the JSLII.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Johnson-Sea-Link submersible.
|
|
R/V SEWARD JOHNSON’S ROV being launched.
|
|
The stern section of the Johnson-Sea-Link submersible.
|
|
JSL is being recovered.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Johnson-Sea-Link submersible.
|
|
Dave Wyansk prepares for a dive to almost 1,800 ft in the JSL II sphere.
|
|
Deep below the photic zone in the JSL II submersible.
|
|
Biologist Dave Wyanski prepares to enter the JSL II sphere. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Sub crew member Jim Sullivan dives from the R/V Seward Johnson to the JSL II. (HR)
|
|
The Johnson-Sea Link II submersible prepares to descend into the sea over the Charleston Bump.
|
|
Johnson Sea Link
|
|
Launching of the Pisces IV.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Alvin first launch.
|
|
Alvin launch.
|
|
Entering Alvin.
|
|
Alvin being moved out of the hanger.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Johnson-Sea-Link II waits for recovery.
|
|
The Johnson-Sea-Link II is launched.
|
|
One of the JSL II dive team enters the aft observation compartment of the submersible.
|
|
An attachment on the Johnson Sea Link is used to “vacuum” an area of the seafloor.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Seward Johnson crew launches the JSL II.
|
|
Mechanical arm of the Johnson Sea-Link
|
|
The Clelia sampling limestone rock
|
|
The Alvin in its berth
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Alvin preparing to descend
|
|
Phantom S2 ROV
|
|
Deploying the Alvin
|
|
The Alvin underwater
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Front view of the Alvin underwater
|
|
The Clelia on the fantail
|
|
Deploying the Johnson Sea-Link
|
|
Front view of the Johnson Sea-Link
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Side view of the Johnson Sea-Link
|
|
The Clelia
|
|
The DeepWorker
|
|
DeepWorker underwater
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Launching the Deepworker
|
|
A-frame launch of DeepWorker
|
|
Articulated crane launch
|
|
Swimmer with DeepWorker
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Remotely Operated Vehicles (ROV)
|
 |
|
 |
|
 |
|
 |
|
ROPOS is deployed from the “fantail” of the Thompson. (HR)
|
|
Covered in sulfur droplets, the ROPOS ROV shows signs of its close encounter with sulfur, rocks and ash. (HR)
|
|
The Hercules ROV as seen from the Argus ROV. (HR)
|
|
Summary
Sampling small coral colony with Hercules manipulator arm.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Recovering the basalt recruitment block experiment with the Hercules ROV. (HR)
|
|
ROV Hercules collecting corals in a "forest" of bamboo whip corals. (HR)
|
|
Working to secure foam from Little Hercules on top of Argus. (HR)
|
|
Collecting fossil corals with a scoop-action, using a net and the Hercules scissor claw. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
A front view of the ROV Hercules shows the white bio-box, powerful arms, lights, and cameras.
|
|
The claw on the Hercules manipulator arm had trouble with some collections. (HR)
|
|
The ROV crew designed and tested a new claw design. (HR)
|
|
Milk crates and carrots help form a simulated seabed for testing. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
ROV Hercules collecting a Keratoisis bamboo coral on Bear Seamount.
|
|
Hercules climbing the side of Bear Seamount.
|
|
Argus is secured on deck.
|
|
Hercules returns home.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
IFE’s light-bearing camera sled Argus on the deck of the NOAA ship Ronald H. Brown.
|
|
IFE’s ROV Hercules on the deck of the NOAA ship Ronald. H. Brown.
|
|
ROV Innovator during a recovery at night. (HR)
|
|
Innovator sample buckets being unloaded after dive.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The ROV Innovator during a morning launch. (HR)
|
|
Morning launch of the ROV.
|
|
Innovator being recovered.
|
|
Mobilization of the Innovator on the NOAA research vessel Ron Brown.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Innovator being submersed during the test dive.
|
|
Port side view of the Sonsub Inc. ROV Innovator.
|
|
Innovator ROV being launched from the Ron Brown during a test dive.
|
|
Using a tether management system to deploy and recover the ROV. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Robotic arm of the ROV Tiburon collecting rock samples.
|
|
The ROV Tiburon placing a fish trap.
|
|
Placing a sea star in a biobox.
|
|
The robotic arm of the ROV Tiburon.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Labeled diagram of the Global Explorer ROV.
|
|
Preparing the Global Explorer for its first dive.
|
|
The NOAA Ship Thomas Jefferson sought safe harbor.
|
|
Jeff checks the quality of a shot in the playback unit.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Hela and Isis, ROV parts.
|
|
The ROV team works on the control and camera systems.
|
|
The ROV team works on the control and camera systems.
|
|
ROV depressor weight is used in submergence of ROV.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The ROV being deployed.
|
|
The ROV sustained damage.
|
|
ROV deployment
|
|
ROV underwater
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Launching remotely operated vehicle
|
|
ROV (ROPOS) deployment and support equipment
|
|
Launching ROPOS
|
|
ROPOS taking a sample of 12,000+ year old clay.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Autonomous Underwater Vehicle (AUV)
|
 |
|
 |
|
 |
|
 |
|
ABE is opened for maintenance, revealing its complex interior.
|
|
Launching the AUV ABE.
|
|
Preparing ABE for its next dive.
|
|
Launching ABE to collect data. (HR)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Diving
|
 |
|
 |
|
 |
|
 |
|
Blue water divers use glass jars to capture gelatinous specimens for further study in the ship’s laboratory. (HR)
|
|
Scuba divers enter the mid-water realm to collect gelatinous creatures. (HR)
|
|
Scientists donned their SCUBA equipment and dove in shallow water.
|
|
Experimental aquaculture farm of deep-water sponges. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Preparing for a dive.
|
|
Dive station.
|
|
Diving Supervisor, Jeremy Stewart. (HR)
|
|
Two divers under the ice.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Ice diver.
|
|
Sea ice divers. (HR)
|
|
SAT bell
|
|
decompression chamber
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
diver signals OK
|
|
Saturation diver and spider
|
|
Diver, spider and Johnson Sea Link over turret
|
|
Diver on spider
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
preparing to dive
|
|
Divers on stage
|
|
Diving bell underwater
|
|
Diving bell
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Inside the diving bell's chamber
|
|
Divers inside the bell
|
|
Divers entering the Monitor's hull
|
|
Divers working on the Monitor at night
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Launching diving bell from barge
|
|
Diving bell entering water
|
|
Preparing to enter the decompression chamber
|
|
Preparing for his working first dive
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Diver "hatting up" for a dive
|
|
Navy diver entering the water
|
|
Diver entering water
|
|
Divers underwater
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Scuba pressure gauge
|
|
Scuba tanks and BCD
|
|
Technical Diver
|
|
Dive Helmet
|
|
|
|
|
|
|
|
 |
|
 |
|
|
|
|
|
Helmet diagram
|
|
Scuba regulator
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Observation Tools
|
 |
|
 |
|
 |
|
 |
|
Plankton nets mounted on the bumper bar of the ROPOS ROV are used to collect plankton above the hydrothermal vent sites.
|
|
A plankton net is deployed to collect near-surface plankton in Maug caldera. (HR)
|
|
Geoff Lebon (foreground) and Ed Baker (background) removie plume water from the CTD bottles after a tow-yo. (HR)
|
|
ROPOS capturing bubbles from the sea floor at Champagne Vent. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
An experiment to observe the change in phase of the bubbles collected at Champagne Vent. (HR)
|
|
Sampling hydrothermal vent fluids with the Hot Fluid Sampler (HFS) at Cave Vent. (HR)
|
|
Freshly-baited crab traps are lowered on a metal platform to the sea floor. (HR)
|
|
The CTD rosette is brought back on deck after having taken water samples and a profile of the water column. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The Eye-In-The-Sea deployed on the edge of the brine pool
|
|
Dip net sampling for Sargassum (HR)
|
|
A floating light-trap (HR)
|
|
A push core being inserted into muddy sediment.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Methane bubbles rising in the water column as a push core was inserted.
|
|
A push core being taken by Alvin’s manipulator.
|
|
Push core inserted into a bed of vesicomyid clams.
|
|
Taylor sorting push cores taken from vesicomyid clam beds.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Taylor holding a push core from the submersible Alvin.
|
|
Push core inserted in sediment.
|
|
Push cores assembled in Alvin’s basket.
|
|
Assembling the push core.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Deploying basalt blocks for a coral recruitment experiment.
|
|
Dip netting for Sargassum off the ship’s stern.
|
|
Dip netting is a technique to collect flyingfish.
|
|
Tucker trawl deployed for a 30-minute set.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Brass block attached to the wire and sent down the line to close the trawl net.
|
|
The Seabird 39 temperature and depth recorder.
|
|
Neuston net towing.
|
|
Steve Stancyk prepares the clod cards for deployment. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Carrion trap baited with rotting oyster. (HR)
|
|
Manipulator arm retrieving carrion bucket.
|
|
Just before midnight, Fred Andrus helps lower the 2,400- lb CTD over the ship’s starboard side. (HR)
|
|
Securing the cups to the CTD frame
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Autonomous Underwater Hydrophone (AUH) mooring (HR)
|
|
Deploying the hydrophone (HR)
|
|
Deploying the syntactic foam float (HR)
|
|
Towfish being recovered (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
MR1 sonar system (HR)
|
|
G. Lebon and S. Maenner launch the CTD (HR)
|
|
Removing an ice core.
|
|
Checking out the box core.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Dave Huntley guides the CTD rosette.
|
|
Fish and amphipod trap deployment.
|
|
Collecting water samples at different depths. (HR)
|
|
Water samples are taken by the Rosette. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
NOAA scientists lower the seacat. (HR)
|
|
Crab pot
|
|
Bruce Strickrott detaching Niskin bottles.
|
|
Putting the gravity corer over the side.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
14 foot gravity core.
|
|
This Otter trawl is one of the devices being used to sample the ocean floor.
|
|
This plankton net can capture the smallest of marine organisms including marine algae, larval fish and invertebrates.
|
|
The yellow floats on top of the neuston net frame insure that it will not sink any lower that 1 meter below the surface.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
A neuston net is being deployed off the starboard side of the R/V Seward Johnson.
|
|
Closeup of a Young Grab.
|
|
Preparing the Young Grab for deployment.
|
|
Deployment of the sonar fish off the stern of the R/V Seward Johnson.
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Raw side scan sonar record of the St. Augustine Scarp.
|
|
Side scan sonar acquisition computer.
|
|
A side scan sonar tow vehicle, also called a ‘fish’.
|
|
CTD deployment for evidence of hydrothermal activity. (HR)
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
The CTD in the staging bay. (HR)
|
|
CTD Rosette
|
|
Multibeam towfish for the Klein 5000
|
|
USBL hydrophone pole
|
|
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
Retrieving PAMS from Jeff's Reef
|
|
Inspecting an Isaacs-Kidd midwater trawl
|
|
Deploying an Isaacs-Kidd midwater trawl
|
|
Isaacs-Kidd midwater trawl
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Diagram of an Isaacs-Kidd midwater trawl
|
|
ECHO awaiting deployment
|
|
Deploying ECHO and the depressor weight
|
|
Diagram of a sidescan sonar towed instrument
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Bioacoustic sampler
|
|
Hydrocast deployment with CTD
|
|
Water sampling from hydrocast "rosette"
|
|
Sonde data
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
Rack for SPMDs
|
|
SPMD spiders
|
|
Cage for SPMDs
|
|
Shipboard Computer System
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
 |
|
GOES-2
|
|
GOES-2 before launch
|
|
GOES-3
|
|
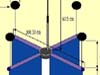
Drifter Diagram
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
Davis Drifter
|
|
|
|
|
|
|







