


















Members of the science team look at a map of Milos Island to plan the next day's science operations. Click image for larger view and image credit.
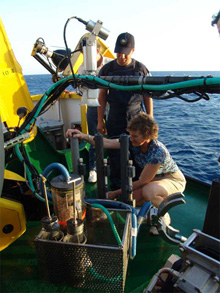
Aggelos Mallios watches as Woods Hole Oceanographic Institution senior research assistant Joanne Goudreau collects water samples from Niskin bottles attached to Thetis. Goudreau will analyze water samples on a gas chromatograph, complementing readings from Dr. Camilli's Gemini in-situ mass spectrometer. Click image for larger view and image credit.
Piloting Thetis
June 26, 2006
36 N, 24 E
Konstantinos Katsaros
Thetis Pilot
Kelley Elliott
Web Coordinator
After a full night’s steam from the Port of Piraeus and Santorini Island, clear indigo waters and sunny skies greet the research vessel (R/V) Aegaeo offshore Milos Island — the first of three focus areas. The dive is the first of the Project PHAEDRA 2006 research cruise and marks an historic event: the first human-occupied vehicle (HOV) dive with a Gemini mass spectrometer. The HOV Thetis has a variety of new instruments and sensors on board, including Gemini. These combined instruments will make possible compelling new science, but integrating them requires strict attention to every detail.
Preparations to integrate the new Woods Hole Oceanographic Institution (WHOI) instrumentation into Thetis began months prior the mission, when Thetis pilot Konstantinos “Kostas” Katsaros and electrical engineer Aggelos Malios flew to Woods Hole, Massachusetts. For 10 days, Kostas and Aggelos worked through problems with Rich Camilli, Brian Bingham, Ryan Eustice, and Brendan Foley. Thetis has dived in the Aegean 342 times. However, each time the total vehicle weight, distribution of weight, and physical or electrical makeup of the vehicle is modified, the vehicle’s behavior in the water also changes. The team discussed technical options, calculating how different weights, orientations, and power supplies would affect operations. Finally, they reached solutions that ensured safe and effective operations.
A month and many preparations later, Thetis sits on the aft deck of R/V Aegaeo, her acrylic bathysphere glinting in the sun. Kostas and Rich give the “okay”— all systems are ready to go. The ship’s A-frame ("Pi-frame" in Greek, because it looks like the Greek letter π) lowers the sub over the transom and into the water below, and Kostas comfortably takes control of the sub. Air ballast inside the sub is released slowly until the sub reaches slight negative buoyancy and begins to descend into the azure Aegean waters. Kostas maneuvers the sub’s control surfaces and alternately powers the thrusters to test the pitch (nose up and nose down), yaw (heading change), and roll (rotation around axis of travel). The descent continues while the pilot and on board scientist monitor data screens. They can also talk to Aegaeo through an “underwater telephone.”

University of Michigan assistant professor Ryan Eustice and electrical engineer Aggelos Mallios synchronize the time on two laptops that will be used to collect navigation data and data from the Gemini mass spectrometer. Precision navigation of the underwater vehicles is a critical research goal for the project. Click image for larger view and image credit.
The 55-m descent to the sea floor goes smoothly, in part because both HOV occupants are used to diving in submersibles. An HOV pilot's top priority is always the safety of the vehicle and the people inside. For Kostas, this means paying attention not only their physical well-being, but also their mental state. Claustrophobic or nervous? Don't worry: Kostas will put you at ease.
The environment outside the acrylic sphere requires more of Kostas’ attention. Currents, surges, and sea-floor relief (such as rocks) need minding. Too much current or a strong surge might draw the vehicle away from its intended course into an unwanted situation. No fender benders are allowed. The clear spherical acrylic window of the submersible, or bathyscape, is only 9 cm thick. That’s all that protects the sphere's inhabitants from the tremendous water pressure outside the sphere. Even a scratch would be a serious problem.
Once the sub nears the sea floor, Kostas’ job really begins: his piloting skills allow science to happen. With the experience gained during hundreds of hours underwater in the submersible, Kostas intuitively knows how to position the sub to gather geological and biological samples, or to place an instrument in the best spot for data collection. He’s seen all sorts of weird and wonderful things on the ocean bottom, and often interprets underwater features even faster than the scientist sitting alongside him.
This is the first dive of the cruise. It’s a test, familiarizing the team with Thetis’ response to its new instrument payload. Kostas settles the submersible onto an area of flat sea floor. He and Rich Camilli run through a checklist to detect any problems with the recently installed connectors and scientific devices. The verdict: everything is okay. Kostas lifts the sub a few meters off the sediments and begins to cruise slowly over the underwater terrain.
Rich watches his computer screen as data from the in-situ mass spectrometer streams in. In less than a minute the instrument is able to scan a full spectrum of hundreds of chemicals and their isotopes, detect trace amounts, and instantly display the data. With accurate navigation and this powerful chemical sensor, scientists in Thetis can find and map hydrothermal vents and cold seeps that would otherwise be invisible. The instruments work perfectly, clearing the way for dives over deeper, active vent sites.
While Thetis glides over the sea floor, Kostas and Rich try out more sampling equipment. The engineers from the Hellenic Center for Marine Research (HCMR) and WHOI arranged three Niskin water sampling bottles on the vehicle’s left manipulator arm. Two of three operate properly, collecting water samples where Gemini "smells" interesting things. The third Niskin bottle doesn’t trip, and will have to be fine-tuned when Thetis returns to the surface. Sediment samples are collected with Thetis' right arm. Short cores are pushed into the sea floor, but don’t work very well. The handles are too long for Thetis, and will have to be modified topside. After about 40 min underwater, Kostas begins the ascent back to the surface.

Vasilis Stasinos secures recovery lines to Thetis. Stasinos is a Hellenic Center for Marine Research diver and the back-up Thetis pilot. Click image for larger view and image credit.

Pilot Konstantinos "Kostas" Katsaros shakes hands with co-Principal Investigator Rich Camilli upon completion of the first Thetis dive during Project PHAEDRA 2006. Click image for larger view and image credit.
Dive Instrumentation
Dr. Richard Camilli
Co-Principal Investigator — Project PHAEDRA 2006
Inventing new oceanographic instruments is an exciting blend of science, creative design, engineering, and professional practice. Back in the lab, my colleagues and I developed a range of instruments with some specific science goals in mind. On this cruise, we saw several of those goals achieved. First and foremost was successful integration and operation of a suite of chemical and navigation sensors onboard the two-person submersible, Thetis. This science payload for Thetis included the experimental Gemini in-situ mass spectrometer and a precision acoustic navigation system (this acoustic navigation system is necessary because GPS does not work underwater).
My American colleagues, Professors Ryan Eustace and Brian Bingham, and I have been working with our Greek colleagues at HCMR, including submersible engineer Aggelos Mallios and submersible captain Konstantinos "Kostas" Katsaros. Over the past few months our work has focused on refitting Thetis. Effective collaboration across seven time zones and two languages was challenging but enjoyable, as many real-world engineering and scientific problems are. It is also helpful that mathematics and circuit design use written languages that are universally understood, much like music. However, integrating a system into a human occupied vehicle is an extremely complex task, because safety is essential and proper integration of control and communications systems require rigorous attention to detail. When we arrived at HCMR, we had 2 ½ days to make all of these new systems operational for Thetis. The pressure was on, but we were ready!

WHOI scientist Rich Camilli reaches to shake Kostas Katsaros' hand following successful completion of Thetis' first dive during Project PHAEDRA 2006. Click image for larger view and image credit.
Our first dive with Thetis in its new configuration took place today off the island of Milos. This volcanic island is most famous for the Venus de Milo statue, which was unearthed there. We chose a shallow area off the coast of Milos as the site of our first dive because we needed to test the operation of the submersible with the new onboard sensors. Before the dive, we made a thorough check of all of Thetis’ systems — similar to what an airplane crew does before takeoff. Next, we synchronized the sensors and began the mission.
During this first dive, we descended to a 55 m (180 ft) depth. Once we arrived at the sea floor we conducted a second set of systems checks. After all of the systems passed a final series of tests we began collecting data with the new sensors. Our months of hard work were rewarded when the instruments worked flawlessly. Within a few minutes we collected more data with the in-situ instruments than we could have in weeks using typical oceanographic methods. Most importantly, we were able to see the results of the measurements instantly, rather than having to first collect the samples and then transport them back to a laboratory for later analysis.
To help verify that the Gemini mass spectrometer was working properly on each dive we also collected water samples to cross-check, or groundtruth, the results observed by the instruments onboard Thetis. The samples were collected by a series of sample chambers mounted on Thetis’ robotic arm. Once we finished our dive and were back on the deck of the mother ship Aegaeo, our colleague Joanne Goudreau processed the samples in the ship’s chemistry laboratory and analyzed them using a gas chromatograph. The gas chromatograph was given the nickname of "Elektra," because unlike Gemini it requires large amounts of electricity to operate. The data goundtruth was a success: the results from Gemini and Elektra agreed.
Sign up for the Ocean Explorer E-mail Update List.