


















The Seabed AUV will be used on this expedition to survey hydrothermal vents within the Columbo volcano. Different types of underwater vehicles are used by scientists for different purposes. AUVs in particular are designed to perform surveys often considered tedious by human operators. Click image for larger view and image credit.
Underwater Imaging with AUVs
Hanumant Singh
Co-Principal Investigator
What is an AUV? What are the different types of underwater robotic vehicles?
Underwater vehicles are central to deep ocean exploration. There are three basic types of underwater vehicles – manned submersibles, remotely operated vehicles (ROVs) and towed vehicles, and autonomous underwater vehicles (AUVs).
Manned submersibles, such as the Deep Submergence Vehicle Alvin ![]() ), are free swimming and typically accommodate a pilot and observers in the submersible. ROVs on the other hand, such as the Jason II
), are free swimming and typically accommodate a pilot and observers in the submersible. ROVs on the other hand, such as the Jason II ![]() , are connected to the ship by an umbilical that supplies power to the vehicle and can pipe data back to the ship. These are operated remotely by pilots stationed onboard the ship. In contrast, AUVs are untethered with no human in the loop. Different types of vehicles are utilized not in competition, but to complement each other. Each vehicle serves its own niche. AUVs in particular are designed to perform surveys that are often considered tedious by human operators. We will be use the Seabed AUV on this expedition to survey hydrothermal vents within the Columbo volcano.
, are connected to the ship by an umbilical that supplies power to the vehicle and can pipe data back to the ship. These are operated remotely by pilots stationed onboard the ship. In contrast, AUVs are untethered with no human in the loop. Different types of vehicles are utilized not in competition, but to complement each other. Each vehicle serves its own niche. AUVs in particular are designed to perform surveys that are often considered tedious by human operators. We will be use the Seabed AUV on this expedition to survey hydrothermal vents within the Columbo volcano.
What does Seabed do?
The Seabed AUV is designed to be a stable, hover-capable platform, able to work close to the seafloor in very rough and rugged terrain. It can dive to depths of 2000m, enabling it to explore the continental shelf of most of the world's oceans. With multiple thrusters, the Seabed can independently control its heading, speed and depth. People often ask how fast Seabed can travel, to which we respond that for the majority of our applications, it is far more important to travel slowly. The ability to move slowly in a controlled manner allows us to make very precise site maps of the seafloor. Why does it have two hulls? Most AUVs are like jet planes while Seabed, in comparison, is like a helicopter. Most AUVs have one hull and look like torpedoes. They are shaped this way to minimize drag as they travel through the water. However, these vehicles need to maintain a constant forward speed in order to enjoy stable flight. Seabed in contrast has two hulls, with most of the weight in the lower hull and most of the floatation in the upper hull. In engineering terms, these two hulls give the vehicle a large metacentric height. Translation: the large separation between its center of mass and its center of buoyancy make it capable of coming to a complete stop, moving slowly and even moving backwards - capabilities which are critical for doing precise surveys of underwater sites.

The original imagery which looks very green as opposed to how it appears after it is color corrected (see image to right). This image is from the 2005 AUV survey of the Chios Classical wreck conducted by the co-PIs of project PHAEDRA. Click image for larger view and image credit.

Color corrected image (see original on left). This image is from the 2005 AUV survey of the Chios Classical wreck conducted by the co-PIs of project PHAEDRA. Click image for larger view and image credit.
Why are the pictures taken underwater so blue/green and what do you do to correct them?
Light underwater is selectively attenuated so that the red component of light is attenuated far more than the blue-green components. Thus most underwater images look blue-green. The Seabed AUV has a special camera that has a very high dynamic range (i.e. one that is capable of recording even small amounts of signal). The imagery taken with this camera can be color-corrected to provide us with images that are representative of what the scene might look like in air in sunlight.
What is photo-mosaicking, and why is it especially important underwater?
Light does not travel very far underwater. So when we seek to image large areas, such as shipwrecks, we can only image pieces at a time that we need to jigsaw puzzle together to get an image of the large scene. The interesting part is that the jigsaw is not simply putting the pieces together, but rather an elastic puzzle where we can stretch and squeeze the pieces together as well.
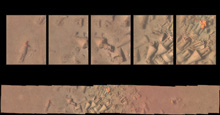
The process of photomosaicking is represented in the series of images above. Similar to a jigsaw puzzle, individual overlapping images are scaled and joined together to create a single coherent strip. Multiple strips may be combined into a large area photomosaic. Click image for larger view and image credit.
Who built Seabed ?
Seabed was built with support from the National Science Foundation’s ![]() Censsis Engineering Research Center
Censsis Engineering Research Center ![]() , the Office of Naval Research
, the Office of Naval Research ![]() (http://www.onr.navy.mil/), and private donors. It was built at the Deep Submergence Laboratory of the Woods Hole Oceanographic Institution
(http://www.onr.navy.mil/), and private donors. It was built at the Deep Submergence Laboratory of the Woods Hole Oceanographic Institution ![]() by a team of researchers and students including Dr Hanumant Singh, Dr Ryan Eustice, Dr Christopher Roman, Dr Oscar Pizarro, Mr. Neil McPhee and Mr. Matt Grund. Seabed and its capabilities continue to evolve in the hands of the next generation of students, including Ballard Blair, Kathryn D’epagnier, and Vikrant Shah.
by a team of researchers and students including Dr Hanumant Singh, Dr Ryan Eustice, Dr Christopher Roman, Dr Oscar Pizarro, Mr. Neil McPhee and Mr. Matt Grund. Seabed and its capabilities continue to evolve in the hands of the next generation of students, including Ballard Blair, Kathryn D’epagnier, and Vikrant Shah.

WHOI scientists, technicians and partners are continuing to advance the development of AUVs for different environments. Deeper versions of the Seabed, called Jaguar and Puma, will be used to look for hydrothermal vent sites under the ice in the Arctic Ocean. Sea trials of these vehicles will be conducted in the fall of 2006. Click image for larger view and image credit.
Where has Seabed been so far and what has it been used for?
Since its inception Seabed has been used on a variety of sites in support of marine archaeology, benthic habitat research, coral reef studies, marine geology and geophysics, and marine chemistry. We have traveled all over the world pursuing these activities including trips to Puerto Rico, Bermuda, Chile, the West Coast of the U.S., and Greece.
Where is Seabed going in the future?
Stay tuned. We will be using deeper versions of Seabed called Jaguar and Puma to look for hydrothermal vent sites under the ice in the Arctic Ocean. We will be conducting sea trials with these vehicles in the Fall of 2006 on the USCG Cutter Healy before our trip to the Gakkel ridge in 2007. In addition we will continue to work on mapping benthic habitats, coral reefs, and ancient shipwrecks during the coming months.
Sign up for the Ocean Explorer E-mail Update List.