
by Jan Albiez, Kraken Robotics
Robert Schwemmer, NOAA
Hans Van Tilburg, NOAA
Michael White, NOAA
July 31, 2019

Image from ROV Deep Discoverer of the ship gun fire-control system with the base of antenna array and cylindrical range finder located above the pilot house. The ship gun fire control system is the highest point of the wreck. Image was taken from the starboard side of the Baldwin, facing port. Bow is orientated to the right of the image. Note the derelict fishing gear on the wreck. Image courtesy of the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 1.0 MB).

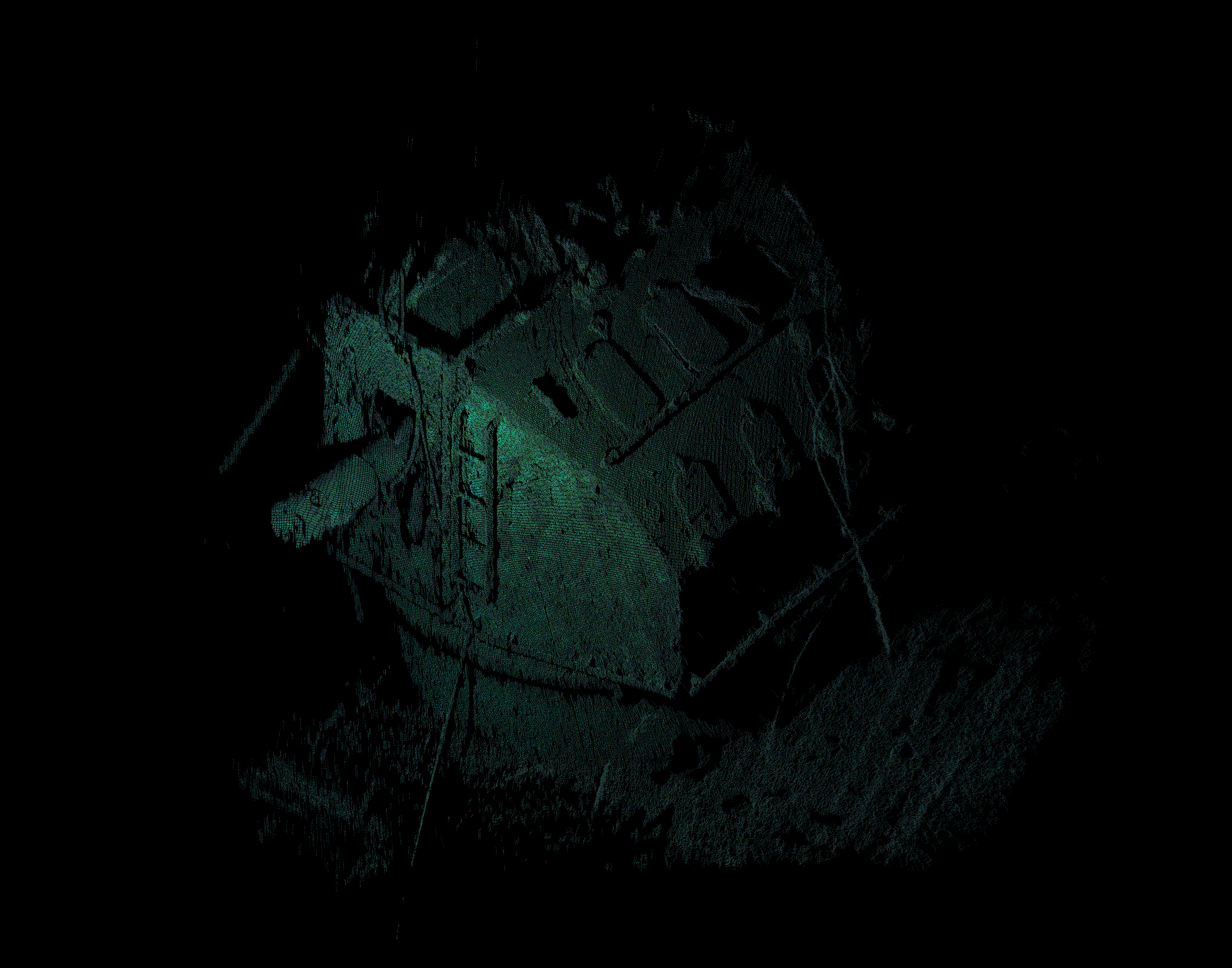
3D high-resolution point cloud of the ship gun fire-control system with cylindrical rangefinder. Image courtesy of Kraken Robotics and the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 2.3 MB).
As part of its mission of ocean exploration, the NOAA Office of Ocean Exploration and Research (OER) endeavors to collect baseline observations of unexplored areas of the ocean. This exploratory data includes underwater cultural heritage, where pieces of our collective history lay undiscovered on the deep ocean floor. These sites are subject to degradation, by both natural and human causes. By collecting baseline observations and high-resolution images and maps of these sites, we can preserve this information for future studies. As with all data collected on NOAA OER/Okeanos Explorer expeditions, the data collected on this expedition will be publically available providing archaeologists, historians, and researchers a foundation for characterization, as allowed.
Kraken Robotic’s SeaVision® is a compact underwater laser imaging system that offers the resolution, range, and scan rate to deliver dense 3D point cloud images of subsea infrastructure with sub-millimeter resolution in real time. The system is designed for deployment on underwater robotic platforms such as remotely operated vehicles (ROVs) and autonomous underwater vehicles. SeaVision® scans a target using a moving laser line projector and a high-resolution camera and delivers a metric-correct point cloud online.
, which had President Franklin D. Roosevelt embarked. Official U.S. Navy Photograph, now in the collections of the National Archives. Credit: Naval History and Heritage Command.")
In the Suez Canal, Egypt, on February 9, 1945. Photographed from USS Quincy (CA-71), which had President Franklin D. Roosevelt embarked. Official U.S. Navy Photograph, now in the collections of the National Archives. Image courtesy of Naval History and Heritage Command. Download larger version (jpg, 156 KB).
USS Baldwin (DD-624) specs: Displacement 1,630 tons; length 348 feet 4 inches; beam 36 feet; draft 17 feet 6 inches; speed 35.0 knots; complement 276; armament 4 5-inch 38 caliber, 5 40 millimeter, 7 20 millimeter, 5 21-inch torpedo tubes, 6 depth charge projectors, 2 depth charge tracks; class Gleaves
Pre-World War II naval destroyers were fast, maneuverable vessels intended to escort larger ships in a convoy or battle group and to defend them against short-range attackers. USS Baldwin, a Gleaves-class destroyer, was laid down on July 19, 1941, at Seattle, Washington, by the Seattle Tacoma Shipbuilding Corp.
After seatrials, Baldwin headed to the East Coast of the United States to complete patrols and convoy escort operations in the Atlantic Ocean. In 1944, Baldwin began patrols in British waters in concert with preparations for the Normandy invasion, during which it supported troops onshore with naval gunfire. Afterwards, the ship headed to the Mediterranean to begin a series of patrols and support preparations for the invasion of Southern France.
In 1945, Baldwin was part of the convoy that carried President Franklin D. Roosevelt on the first leg of the trip to the ‘Big Three’ conference at Yalta. Later in 1945, Baldwin sailed from New York to the Pacific, supporting preparations for the occupation of Saebo, Japan, and operating along the Chinese and Korean Coasts.
Baldwin was placed out of commission at Charleston, South Carolina, in 1946 and remained in reserve until 1961, when it was transferred to Boston. When being moved from Boston to Philadelphia, the towline transporting the Baldwin broke, and the destroyer ran aground at Montauk Point, Long Island. Baldwin was scuttled on June 2, 1961, offshore near Block Canyon.

USS Baldwin aground near Montauk Point, Long Island. Since the date this image was taken was so close to the date of scuttling, the onboard mission team, including the ROV pilots and scientists onshore through telepresence, relied heavily on this photo to safely navigate the ROV dive on July 27, 2019. Image courtesy of Naval History and Heritage Command. Download larger version (jpg, 503 KB).

Images from ROV Deep Discoverer looking at the ship’s number on the starboard bow of the wreck. Inset shows a historic photo of the ship port side, with a view of the hull numbers. The digits “6,” “2,” and “4” are clearly visible. Combined with the position of the wreck and the features found while exploring it, the team was able to confirm that the wreck is indeed the USS Baldwin. Images courtesy of the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 574 KB).
Bow facing south and lying straight up, the Baldwin remained silently on the seafloor until July 27, 2019, when a team lead by OER was able to use ROVs and the Kraken SeaVision® laser scanner to image and document the wreck site.
This site was identified as a potential (now confirmed) shipwreck using mapping data collected by OER during a 2011 mission on the Okeanos Explorer. By documenting this site, NOAA OER will be able to publicly provide baseline characterization data to archaeologists, historians, and other researchers.

Image from ROV Deep Discoverer looking down at a capstan on the forward deck, with the prow towards the bottom of the image. Note the hake fish aggregated on the ship. Image courtesy of the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 867 KB).

3D high-resolution point-cloud rendering of the forward deck and capstan. Image courtesy of Kraken Robotics and the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 496 KB).

3D scan of the starboard flybridge with the open door into the bridge. The scan shows one of the many fishing nets entangled in the wreck. Image courtesy of Kraken Robotics and the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 564 KB).

The Bofors 40 millimeter anti-aircraft guns were arguably the best light anti-aircraft weapon of World War II, employed on almost every major warship in the U.S. and UK fleets during World War II, circa 1943 to 1945. They were most effective on ships as large as destroyer escorts or larger when coupled with electric-hydraulic drives for greater speed and the Mark 51 Director for improved accuracy. The Bofors 40 millimeter gun became a fearsome adversary, accounting for roughly half of all Japanese aircraft shot down between October 1, 1944, and 1 February 1, 1945. The gun bases are present, the barrel breaches were removed while in reserve status. Image courtesy of Robert Schwemmer NOAA/NOAA OER. Download larger version (jpg, 564 KB).

3D high-resolution point cloud of the port after 40 millimeter anti-aircraft Bofors gun bases, the barrel breaches were removed while in reserve status. Laser scanning was completed from the starboard side of the Baldwin. Image courtesy of Kraken Robotics and the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 2.4 MB).

3D point-cloud colorized using a still camera frame of the bow stem. Image courtesy of Kraken Robotics and the NOAA Office of Ocean Exploration and Research, 2019 Technology Demonstration. Download larger version (jpg, 97 KB).





{kind=link}
{kind=link}