
By Kevin Boswell, Associate Professor and Director of the Marine Biology Program at Florida International University.
From July 26 to August 1, 2021, a multi-institutional science team will set sail aboard the R/V Point Sur from Gulfport, Mississippi and head towards DeSoto Canyon. The objectives of this mission, funded by NOAA Ocean Exploration, are to deploy two different autonomous sensor platforms developed as part of this project: National Geographic Society’s Driftcam and the Teledyne Webb Research Slocum glider. During this cruise we will focus on areas that have been studied extensively during the DEEPEND|RESTORE program in the Gulf of Mexico (GoM).
The oceanic rim ecosystem, including waters of the outer continental shelf, is arguably the least-known marine habitat in the U.S. Exclusive Economic Zone (EEZ). Rather than a gradual transition, recent exploratory work has revealed the presence of unique, ecotonal (a transition zone between two adjacent communities) assemblages of high diversity, biomass, and productivity, both in the pelagic and bentho-demersal communities. The majority of the ~1,500 species known to occur in the Gulf of Mexico spend all or part of their lives in the open-ocean pelagic biome including large taxa (e.g., tunas, billfishes) that are integral to Gulf State fisheries. Endangered toothed whales (e.g., sperm whales), seabirds, and epipelagic game fishes rely on deep pelagic nekton as prey. Mesopelagic fish biomass also constitutes a major component of the global carbon cycle, contributing about 1 billion tons, which dominates the world’s total fish biomass. Many of these species comprise the ubiquitous scattering layers (SLs) that undergo daily vertical migrations (DVM) of hundreds to thousands of meters, and link epipelagic with the meso- and bathypelagic biomes.
The autonomous sensor platforms will be deployed at stations near the DeSoto Canyon and also along the shelf break where the mesopelagic community interacts with complex bathymetric features. The platforms will be targeting the daily movements of the SLs as they migrate between the deep waters (~1000 meter or ~3280 feet) and the surface waters (~50 meter or ~164 feet) to non-invasively capture high-resolution imagery and acoustic measurements of the animals on the move.
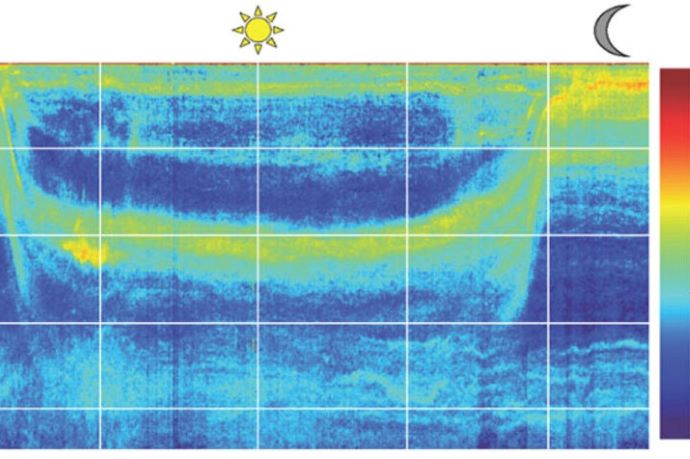
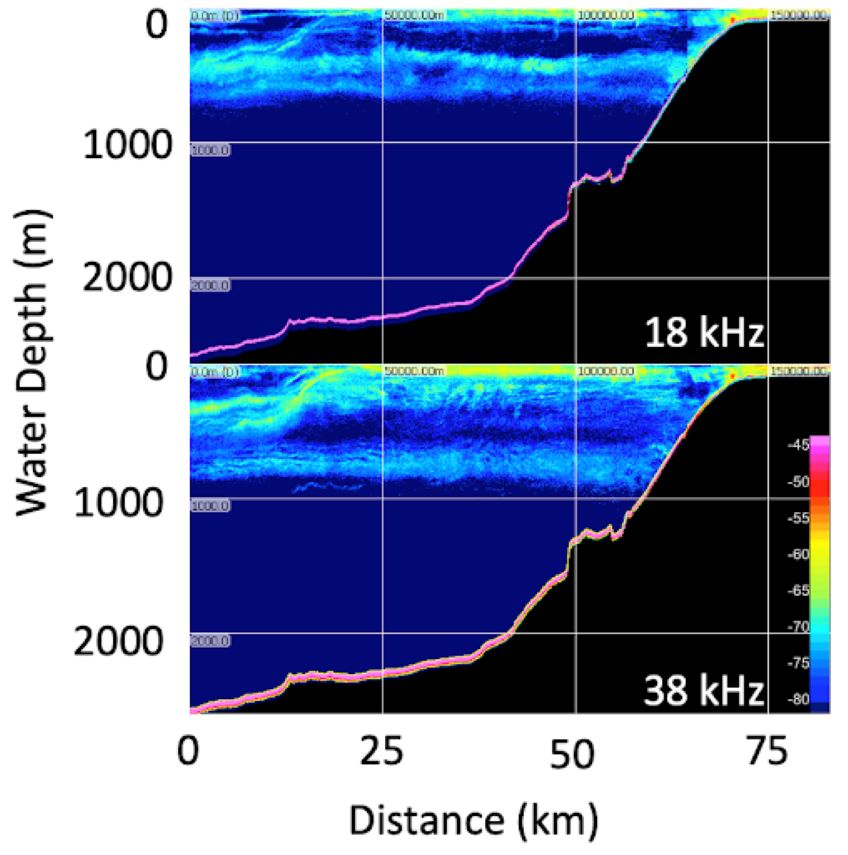
 and 38 kHz (bottom) shows the vertical and horizontal distribution of biological scatterers associated with the shelf break in the northern Gulf of Mexico. Color scale represents acoustic scattering intensity (in dB re 1 m-1).")
Figure 1. Acoustic backscatter data at 18kHz (top) and 38 kHz (bottom) shows the vertical and horizontal distribution of biological scatterers associated with the shelf break in the northern Gulf of Mexico. Color scale represents acoustic scattering intensity (in dB re 1 m-1). Image courtesy of Kevin Boswell, Florida International University. Download largest image (jpg, 144 KB).
The team will run a series of test deployments of both autonomous sampling systems down to ~250 meters (~820 feet) and then set them off to explore the deeper depths (~1000 meter or ~3280 feet). The ship will operate a real-time multi-frequency scientific echosounder system (Simrad EK80) to provide data on the depth of the SLs which will guide the depths targeted by the Driftcams and Slocum Glider (Figure 1). During the deployments, three Driftcams (Figure 2) will be released and programmed to silently move within the layers to capture images of animals at depth. The Driftcams will communicate directly with the ship to send status updates and position while underwater. The Slocum glider will be simultaneously deployed and programmed to run through the SLs and capture high-resolution acoustic data from the onboard echosounder (Figure 3).
The two technologies developed during this project will permit access to the deepwater habitats and study the organisms that comprise the SLs without the need to interfere or capture the animals. In particular, the two methodologies being implemented will allow researchers to non-invasively explore the animals that inhabit the mesopelagic regions of the ocean while also collecting important data about their composition and behavior. The shipboard echosounder system (Simrad EK80) will be used to locate and identify the depths of the SLs and serve as the bird’s-eye view of the organisms in the water column. The Driftcam and the Glider will then be programmed to target those SLs and explore the animals that are part of this feature.
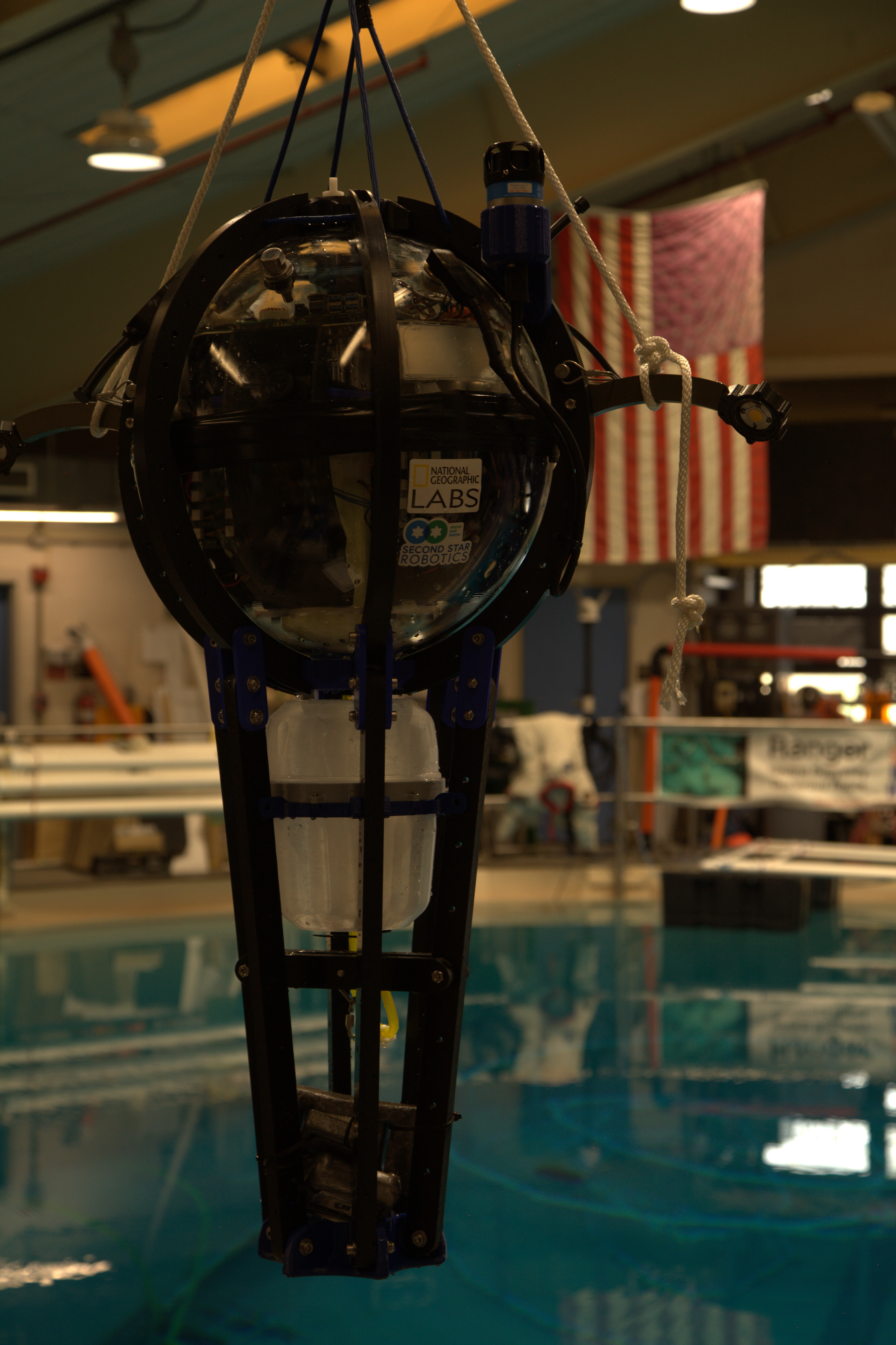
The Driftcam is configured with a high-definition/low-light video capture system (Nocturn XL, Photonis, MÅLerignac, France) that will be used to capture imagery to identify the community composition of the mesopelagic SLs and to aid in the interpretation of the acoustic data collected. The Driftcam will communicate with the ship to provide location and status and to receive commands for correcting or changing the vertical position relative to the SLs.

Figure 2. Driftcam prototype developed by National Geographic Society configured with high-resolution low-light cameras to capture detailed imagery of Scattering Layer constituent species. Image courtesy of Kyler Abernathy, National Geographic Society. Download largest image (jpg, 4.7 MB).
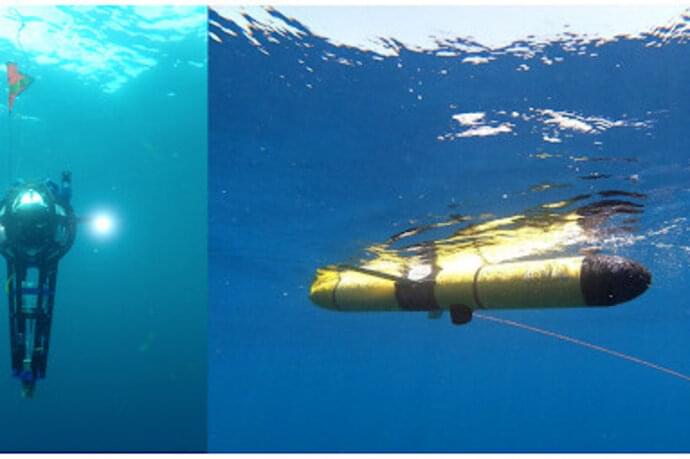
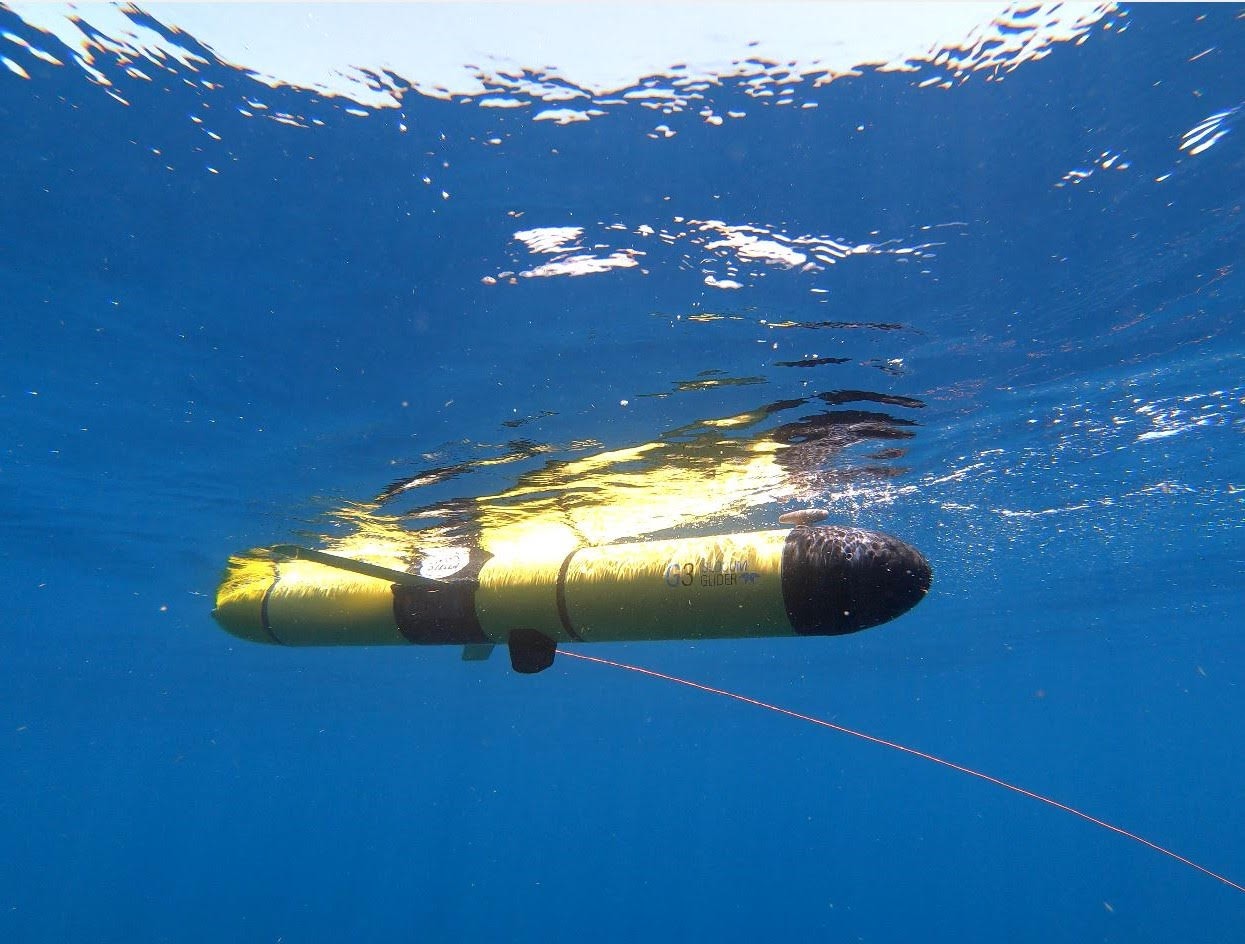
The Teledyne Webb Research Slocum Glider is configured with a custom science bay that contains a new Simrad EK80 Wide Band Transceiver (WBT) Mini echosounder and 200 kilohertz transducer (Figure 2). The echosounder will be programmed to collect high-resolution acoustic backscatter data on the descent or hovering phases of the glider. The glider has been outfitted with an on-board processor to compute backscattering statistics and transmit back to the ship via the ARGOS satellite system. Access to the near real-time data will allow researchers to adjust the sampling plan of the glider and better ascertain the dynamics of the SLs. Moreover, these data can be used to modify the position of the Driftcam swarm within the water column.
 Mini echosounder capable of measuring the in situ backscatter response of sound scattering layers. Photo credit: Chad Lembke, University of South Florida")
Figure 3. Slocum glider with integrated Simrad EK80 Wide Band Transceiver (WBT) Mini echosounder capable of measuring the in situ backscatter response of sound scattering layers. Image courtesy of Chad Lembke, University of South Florida. Download largest image (jpg, 162 KB).
This project is funded by NOAA Ocean Exploration. Science partners during this mission include scientists from Florida International University, the University of South Florida, the University of Washington, Nova Southeastern University, the National Geographic Society, and NOAA National Centers for Coastal Ocean Science.
Published July 27, 2021



{kind=link}
{kind=link}
{kind=link}