By Kyler Abernathy, National Geographic Exploration Technology Lab
and Lu Wang, NOAA Ocean Exploration
Releasing tens of thousands of dollars of instrumentation into the ocean is tricky — you may not get it back once it’s in the water. Because of this, a large part of ocean engineering consists of rigorous testing and incorporating system redundancies before deployment in the open ocean.
The National Geographic Society (NGS) Driftcams were tested during development at the Neutral Buoyancy Lab at the University of Maryland, and designed to overcome obstacles in the field, including communication errors, lost controls, and becoming physically lost. However, the true test lies at sea, where conditions may not always be favorable, predictable, or possible to simulate in lab conditions.
This expedition is the first time these new model Driftcams are being tested at sea. First, each Driftcam’s communication and buoyancy engine are tested in the ship’s dry lab. Then they are set in the water while tethered to a small boat, where fine adjustments to the ballast are made to accommodate for the local water density. After a Driftcam clears those stages, it is deployed untethered to a relatively shallow depth (50 meters or about 164 feet) to confirm that all the things tested before are working while the device is fully autonomous.

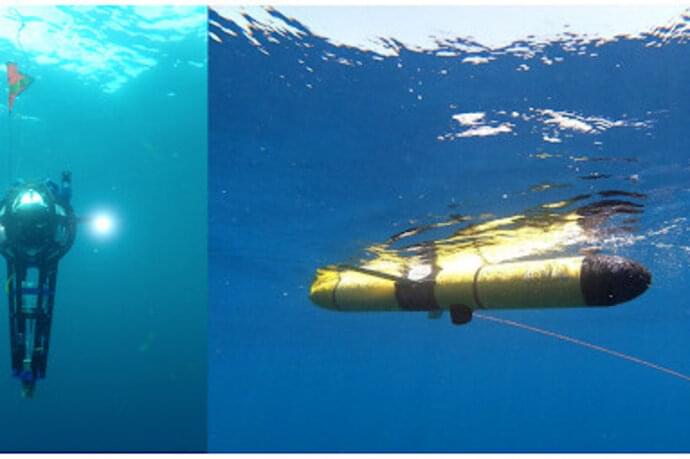
National Geographic and Second Star Robotics team members deploying the Driftcam “Dory.” Image courtesy of April Cook, Nova Southeastern University. Download largest version (jpg, 7.3 MB).
One of the Driftcams passed all previous tests and was released at dusk. Despite all previous testing, acoustic communications from the ship to the Driftcam did not work. The system was submerged and the team had no way to know its location or depth. Meanwhile, sunset was fast approaching. This set off around 15 hours of unknowns as the team worked to relocate the Driftcam, henceforth known as “Dory.”
Below is a non-exhaustive list of problems the team faced, and the system redundancies in place that allowed them to overcome the issues.
After more than three hours with no VHF signals or satellite messages, the team had to assume that the automatic burn wire release of the drop-weight had not occurred.
BUT there is a plan for that too. In case the software, batteries, or connection wires fail and cannot release this weight, there is also a GTR (galvanic timed release) in the links holding this drop-weight. This is made of magnesium, which naturally dissolves at a roughly predictable rate when in seawater, and eventually weakens to the point where the weight is dropped (over 15-36 hours, depending on the thickness of the selected link).
Because this mechanism is not precisely timed, the team could not know exactly when it would release. They took turns waking up regularly through the night, checking the satellite service website for messages.
.")
Map of the ship’s location in the Gulf of Mexico. The yellow points are labeled with locations of interest, including location pings from Driftcam “Dory” at 4 a.m. and 6 a.m., and its projected location, based on the two previous points, at 9:45 a.m. (yellow point in the center of the screen). Image courtesy of April Cook, Nova Southeastern University. Download largest version (jpg, 5.5 MB).
Finally at about 3 a.m. the next morning, messages from Dory began appearing, providing its location. The team was able to calculate Dory’s speed and trajectory based on her location pings.

National Geographic and Second Star Robotics team members communicating with Driftcam “Dory” near the bow of the R/V Point Sur. Image courtesy of April Cook, Nova Southeastern University. Download largest version (jpg, 5.4 MB).
At around 10:30 a.m., our ship’s first mate spotted the flag affixed to Dory as the R/V Point Sur followed in the general direction of Dory’s trajectory. System redundancies in design, and the team’s flexibility and ability to troubleshoot under pressure allowed us to eventually find Dory. Of course, having an excellent crew and a capable ship was also invaluable to this effort.

Our National Geographic and Second Star Robotics team members on the small boat to retrieve Driftcam “Dory.” Dory can be seen in the distance, affixed with a bright orange and reflective flag. Image courtesy of April Cook, Nova Southeastern University. Download largest version (jpg, 6.1 MB).
Published August 2, 2021