Autonomous, Directional Acoustic Profiling Float for Soundscape Characterization
Dates
September 23-27, 2024
Vessel
n/a
Location
Off Oceanside, California
Primary goal
Develop and demonstrate an autonomous, near real-time, directional acoustic profiling float powered by marine renewable energy
Primary technologies
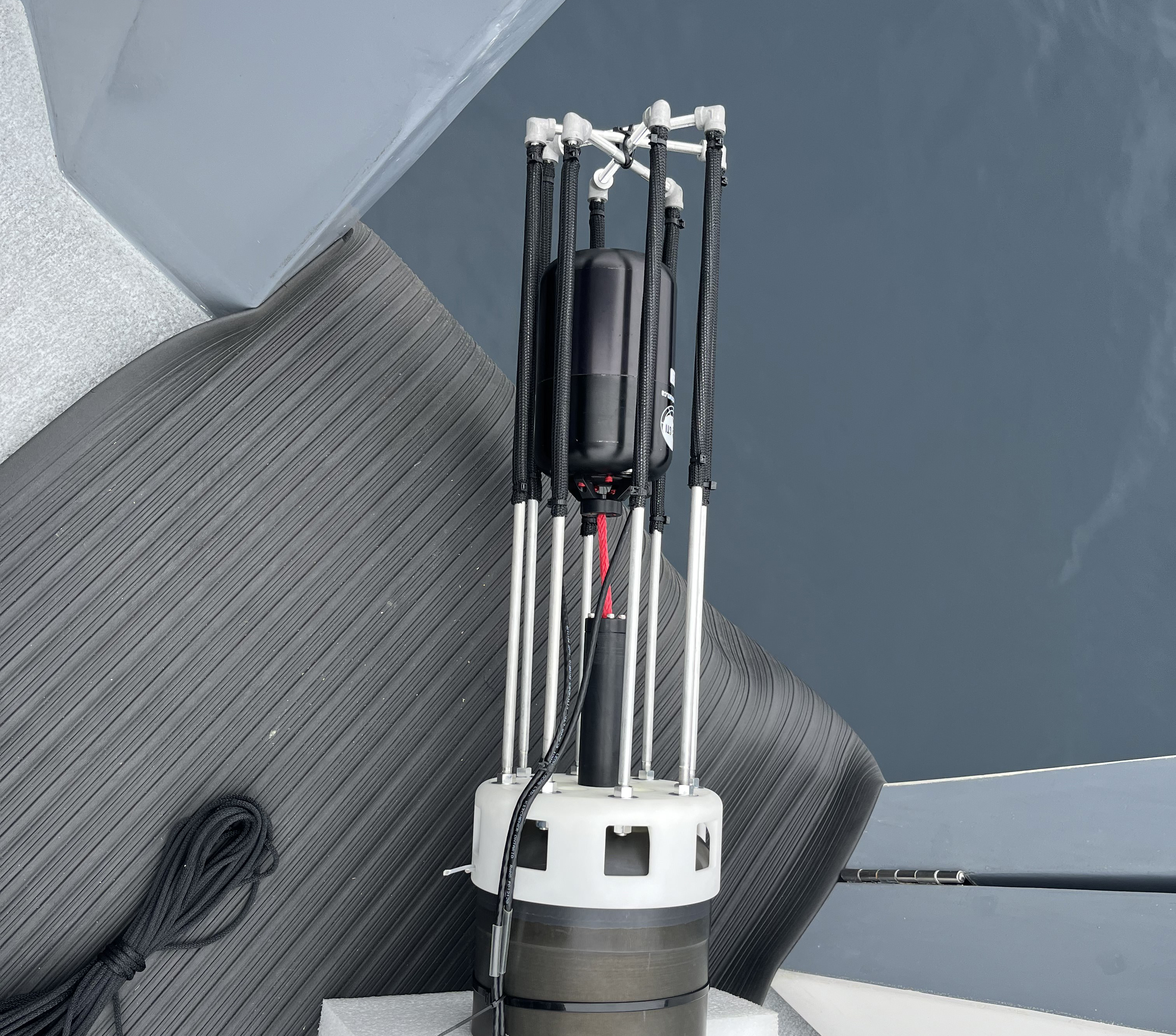
Seatrec’s infiniTE™ float, directional acoustic sensor
Project Overview
To advance deepwater soundscape exploration, a research team will develop and demonstrate the first ever autonomous, near real-time, directional acoustic profiling float powered by marine renewable energy (ocean thermal energy conversion, OTEC). They will also develop soundscape analysis tools to provide insights into acoustic events of interest recorded by the float.
Sound is a crucial component of ocean science and stewardship. Deepwater soundscapes can provide insight into marine mammal distributions, seismic and volcanic activity, illegal fishing activity, other human activities, and more. Yet, collecting acoustic data in the deepest and most remote parts of our ocean has historically been difficult, largely due to the challenges of deploying and recovering traditional acoustic sensing equipment in these hard-to-reach places. In addition, most acoustic data is typically collected using omnidirectional hydrophones that can detect and record sound, but not locate its source: they don’t provide directional information.
The vector sensor used on this portable and low-cost float is able to provide directional information, enabling researchers to identify where in the ocean the detected sound is coming from. Together, these technologies will enable sustained exploration of poorly understood deepwater soundscapes, eventually increasing the amount of global soundscape data — data that will expand the breadth of our deep-ocean knowledge, support biological and hazards monitoring, and inform management and mitigation of ocean noise to eliminate or reduce impacts on marine life.
Year One Fieldwork Summary
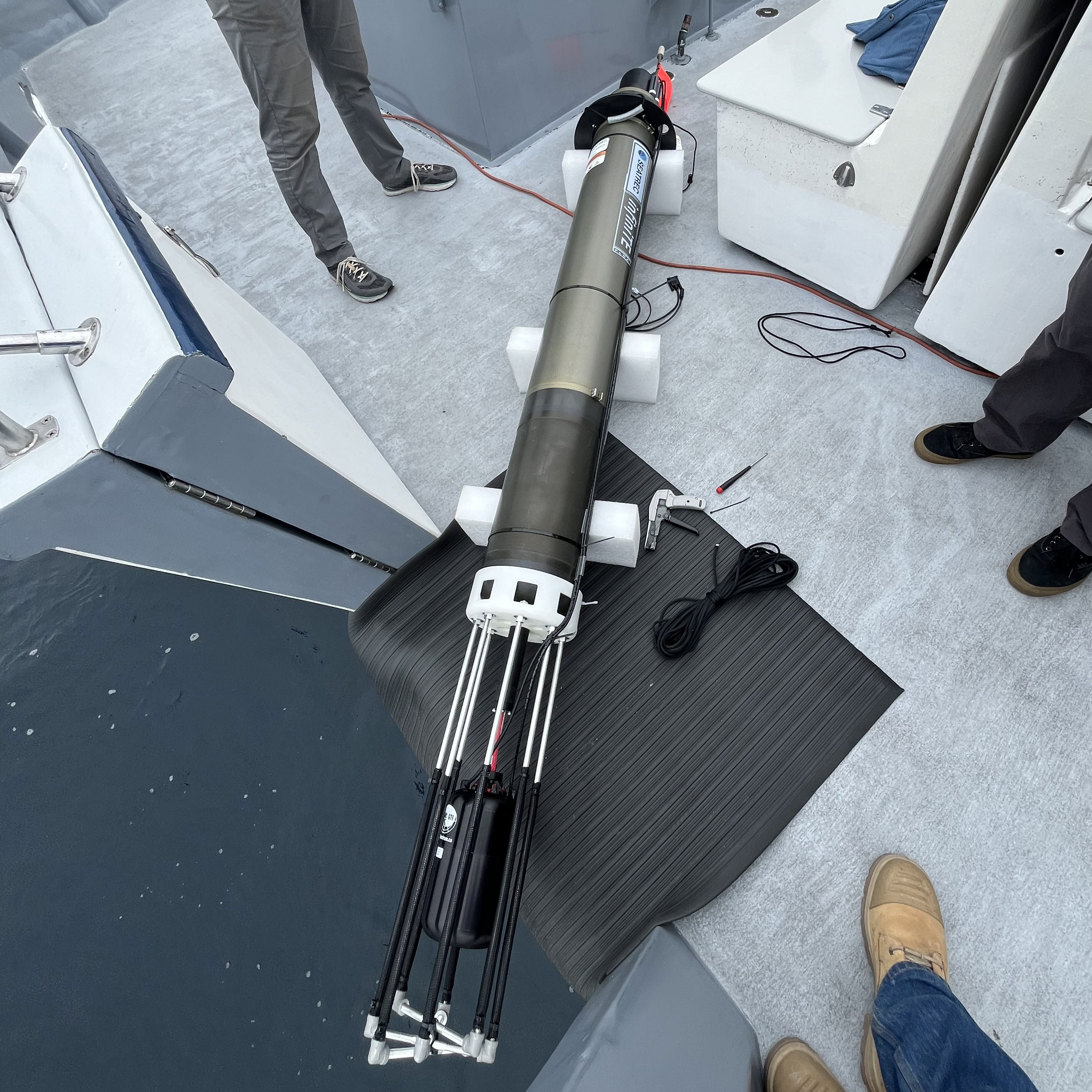
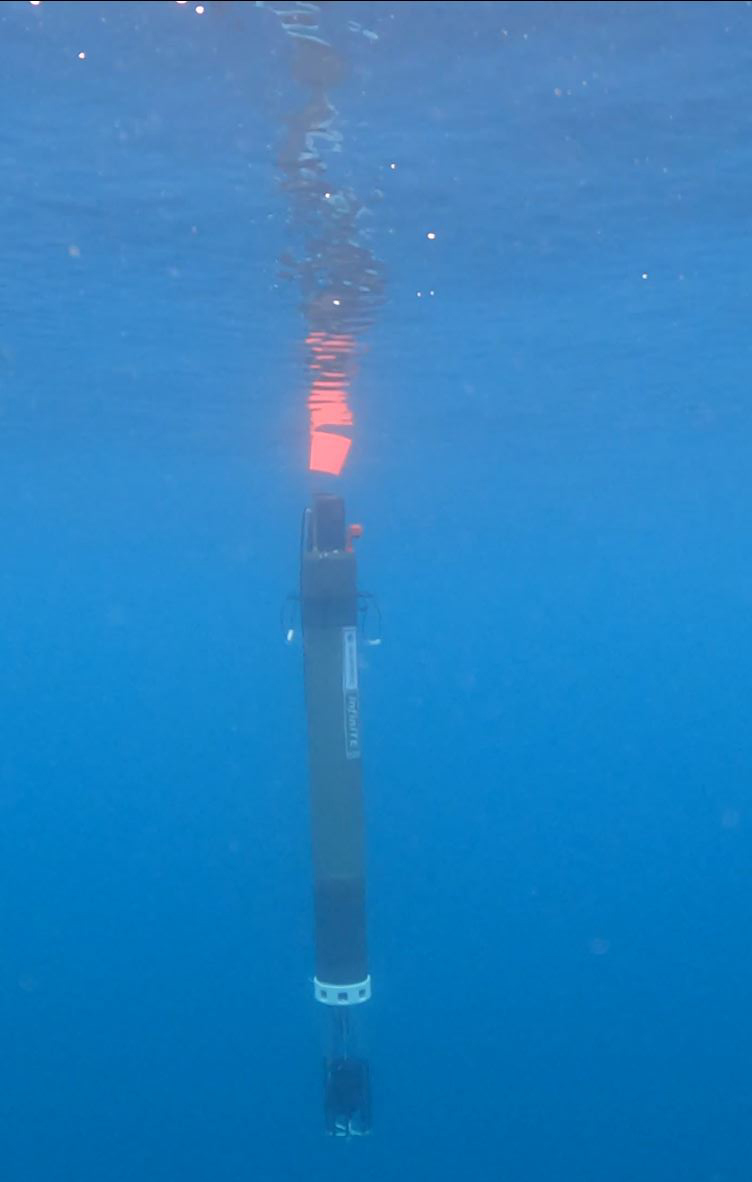
From September 23-27, 2024, the team of scientists and engineers deployed their Seatrec infiniTE float with a directional acoustic sensor for its first field demonstration off the coast of Oceanside, California.
Preparing to Deploy
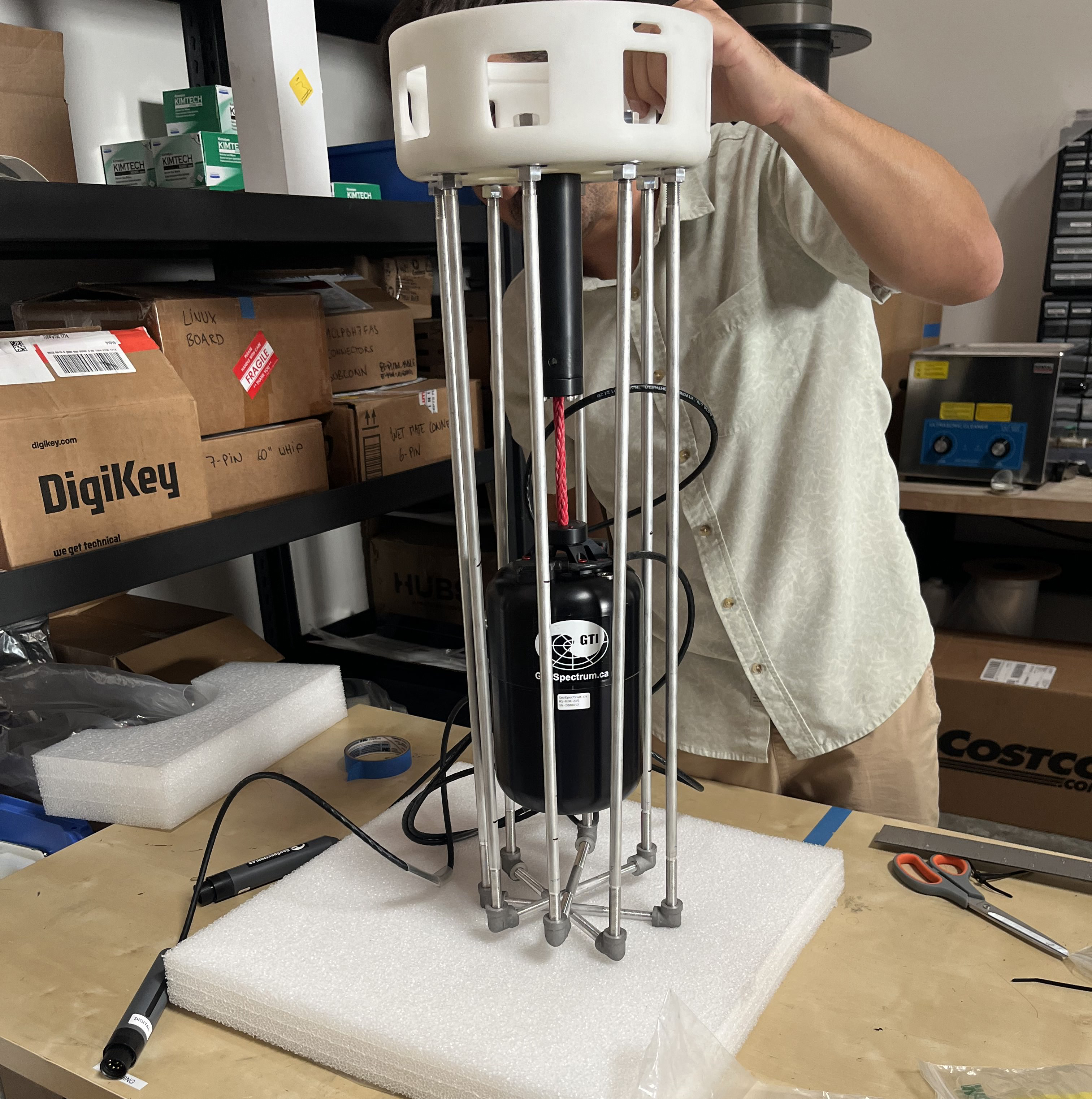
In preparation for this deployment, they designed and developed a mount to suspend the sensor below the float body. To accommodate for this added weight and ensure the appropriate amount of buoyancy, they introduced additional volume by extending the length of the float at the top. To capture data from the sensor, they also designed and developed a data logger and built a mount to hold the data logger and its battery pack inside the float.
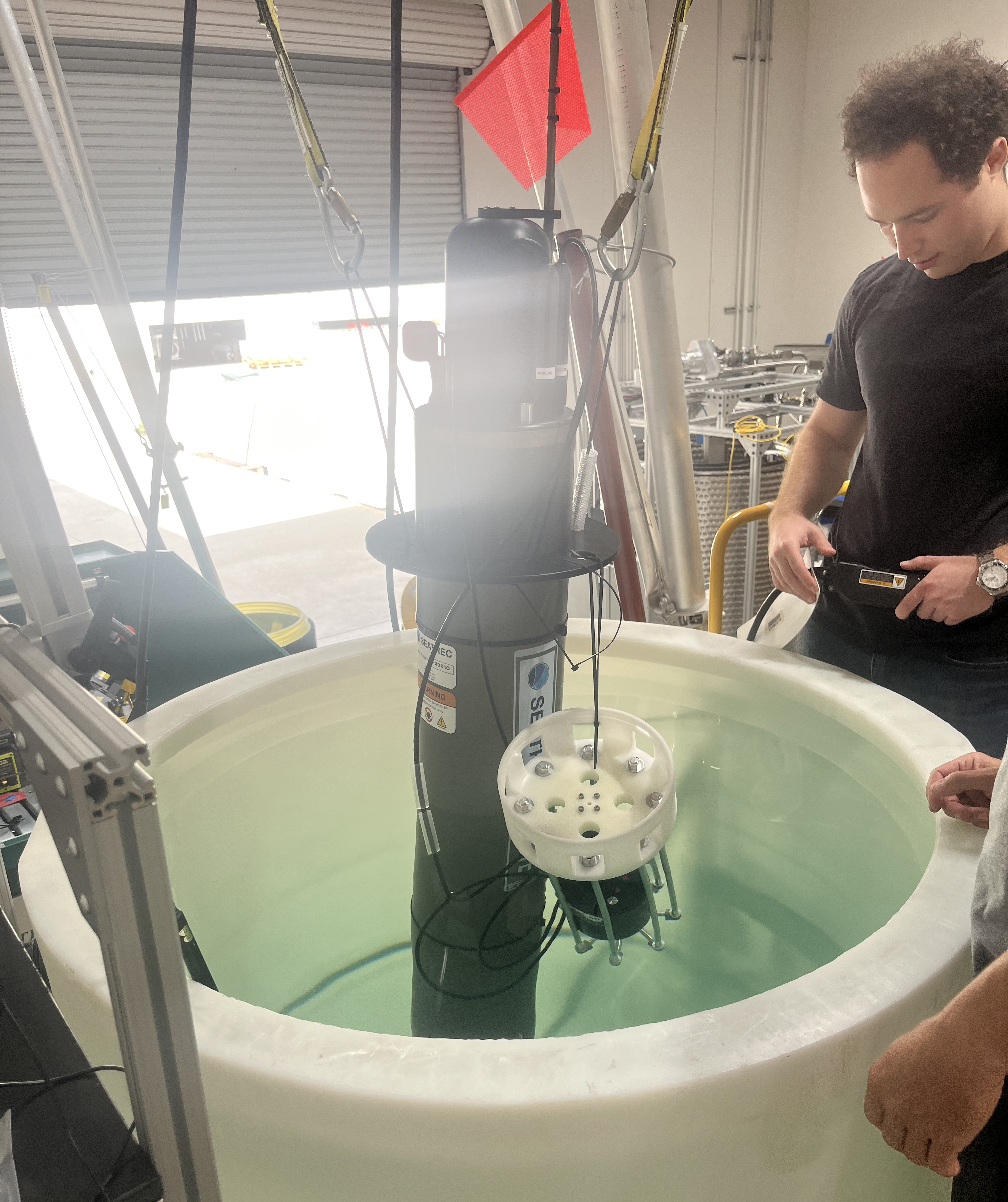
Before heading out to sea, they conducted a final system integration at the Seatrec office in Vista, California. This included testing the final ballast test to ensure that the float buoyancy engine could accommodate the additional weight from the sensor and its mount, testing the communications system to ensure the satellite communications link was functional, connecting the data logger battery and external sensor connectors to the data logger, and a conducting a full test of the float with the sensor connected to make sure everything was in working order.
Testing the Float

On July 26, they successfully deployed and demonstrated the float at sea for the first time for three 8-hour-long dives down to approximately 400 meters (1,312 feet), where it remained "parked" for several hours. After surfacing and relaying its position to the ship via the satellite telemetry link, it was recovered by the team.
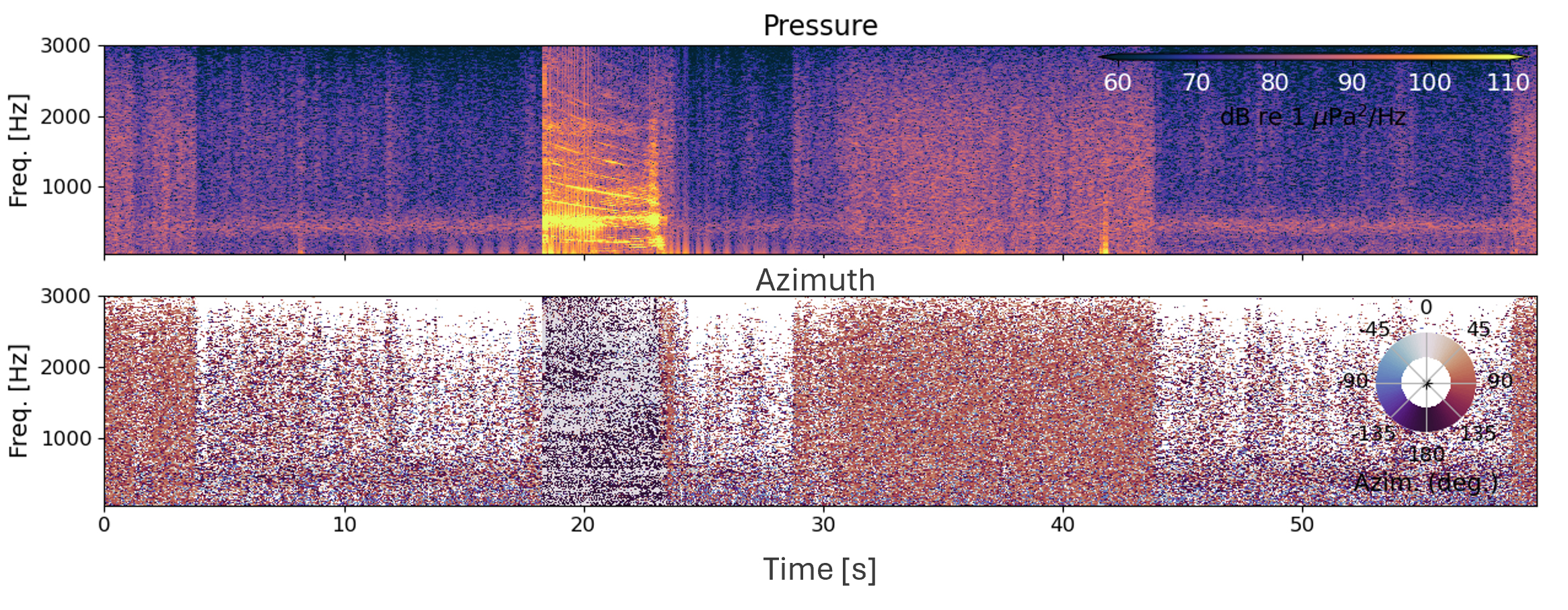
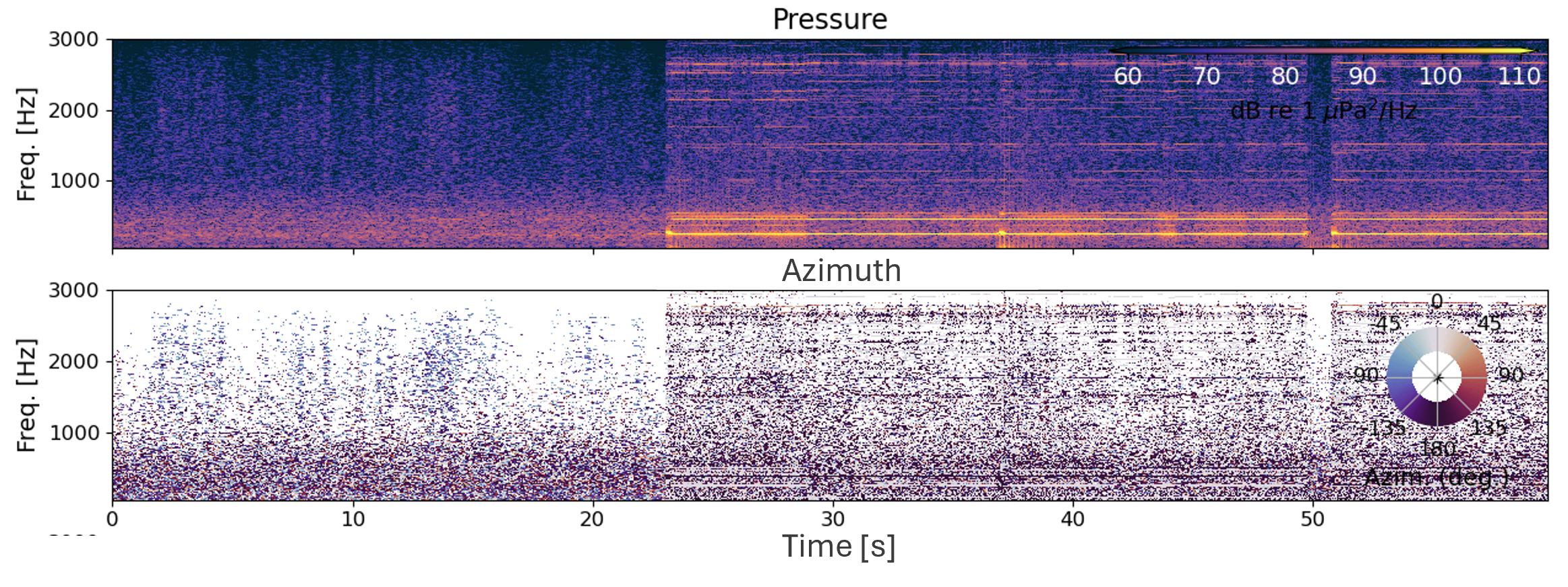
They collected approximately 24 hours of uninterrupted directional acoustic data throughout the float operations, including diving and parking at depth.
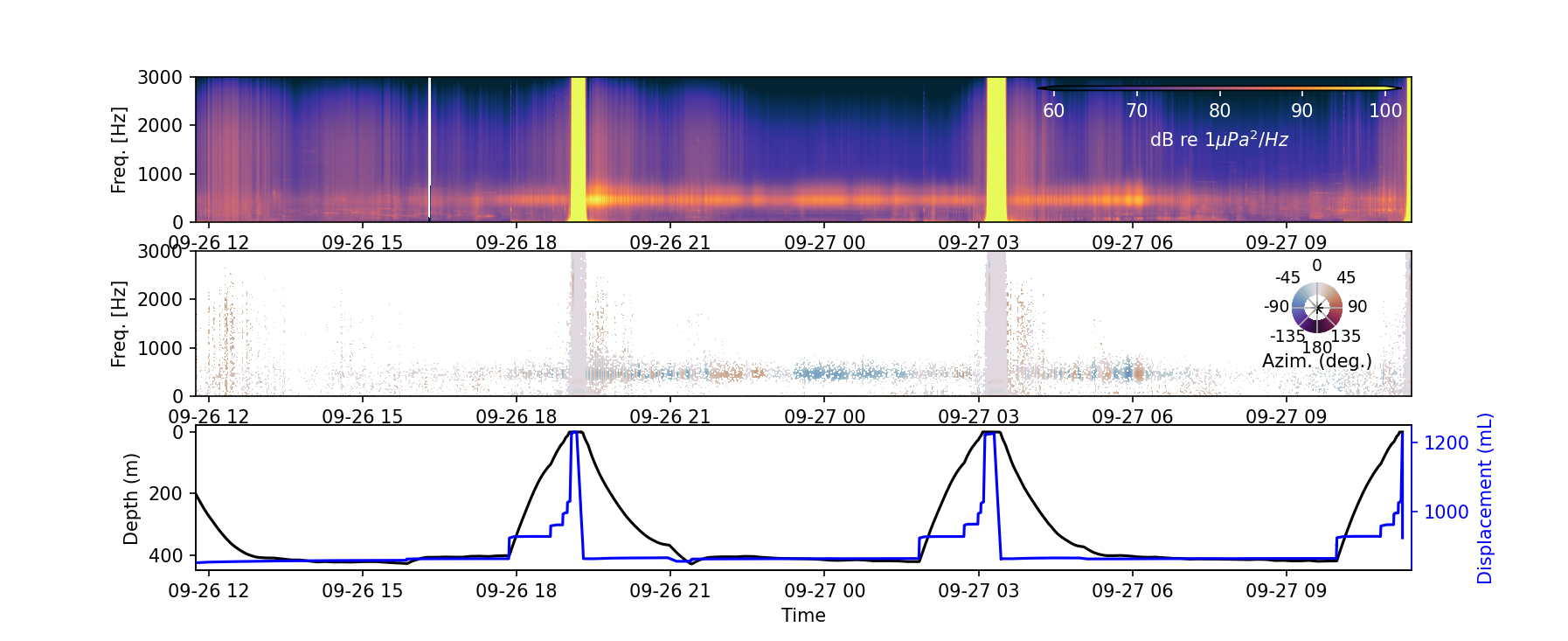
Most of the data represented ambient noise, but the occasional boat sound was also captured. The quantity and quality of the data collected was enough to meet the goals of this field demonstration. Thus, no further deployments were conducted.
Next Steps
This was just the first of two demonstrations planned as part of this project. It paves the way for a longer duration, deeper water test, currently scheduled for summer 2025. Until then the team will:
- Use data from this deployment to help develop onboard processing algorithms.
- Refine the float controls to incorporate data logger controls.
- Enable time synchronization between the float and the data logger.
- Refine the data logger communications to be able to request specific data segments from the data logger in order to process them for telemetry.
- Implement efficient onboard processing for telemetry.
- Develop a deepwater mission based on the energy requirements of the directional acoustic sensor and associated electronics.
This demonstration was likely the first time that directional acoustic data was collected at such depth using an autonomous profiling float. Ultimately, the team hopes this float will enable deepwater exploration of ocean soundscapes in difficult to reach regions of the global ocean.
Meet the Explorers

Kaustubha Raghukumar
Principal Investigator; Senior Marine Scientist
Integral Consulting Inc.
Josh Laney
Firmware Engineer
Seatrec Inc.

Sean Griffin
President
Proteus Technologies LLC

Michael Zedelmair
Senior Vice President of Engineering
Seatrec Inc.
Related Links
- Sounds in the Ocean: Mammals | Environmental and Anthropogenic | Fish and Invertebrates
- Listening to the Sea
- NOAA’s Ocean Noise Strategy
- Sanctuary Soundscape Monitoring Project (SanctSound)
- Passive Acoustic Technologies
Partners
Media Contact
Emily Crum
Communications Specialist
NOAA Ocean Exploration
ocean-explore-comms@noaa.gov
Funding for this project was provided by NOAA Ocean Exploration via its Ocean Exploration Fiscal Year 2023 Funding Opportunity.
Published November 6, 2024