Exploring Attu’s Underwater Battlefield and Offshore Environment
Mission Plan
This project seeks to bring attention to the World War II Battle of Attu (1943) through ocean research and exploration. Surveys of the seafloor will be executed using synthetic aperture sonar (SAS), an emergent form of marine remote sensing technology. Survey areas include two bays (Holtz and Massacre) that figured prominently within the Battle of Attu, and offshore locations where the U.S. naval fleet operated during the skirmish. The project will incorporate an interdisciplinary approach, with attention paid to the offshore bathymetry and ecology, namely cold/deep-water corals and sponges. Finally, consideration will be given to evidence for colonial and indigenous maritime activity that predates WWII. Sonar targets will be subject to remotely operated vehicle (ROV) photo surveys for ground-truthing, which enable wreck site identification and biological characterizations. Throughout the project, the research team will work to ensure that the findings are properly disseminated amongst the public, while remaining committed to the inclusion of indigenous perspectives and interests through collaborations with native Alaskan stakeholders.

The research team maintains a detailed list of vessels and aircraft that were recorded as sinking at Attu, and thus remote sensing operations will target suspected wreck locations. The heightened level of naval and aerial activity around the island during World War II has resulted in a situation where there is archival evidence for far more wrecks than can be surveyed during the project’s duration. The principal investigators of the project have ranked targets according to the reliability of the locational data and historical significance. Thus, if the highest priority sites cannot be accessed due to the unpredictable nature of the Aleutian weather or unfavorable seafloor conditions, there is a list of alternatives that may be in safer locations. The ship’s captain, as well as the sonar and ROV operators will ultimately decide the feasibility of proposed survey areas on a day-to-day basis.
At Attu, ThayerMahan, Inc. personnel will be responsible for deployment of the MINSAS-equipped towfish, SeaScout-2. SeaScout-2 will be deployed from the ship’s stern, where it will be hoisted from its cradle prior to being launched. Once in the water, SeaScout-2 will be towed using the ship’s rear A-frame, with cable fed through a specialized winch brought specifically for this survey. Charts for Attu have seldom been updated since the original hydrographic surveys in the 1940s, and never with the aid of modern technology. Due to this uncertainty regarding the seafloor topography, it will be necessary to conduct high-altitude multibeam-only “pre-surveys” to create a general map of the area, ensuring safe towing conditions and the absence of significant obstructions (such as seamounts). If the physical conditions are conducive for towing SeaScout-2, detailed investigations will be conducted covering depths of up to approximately 250 meters. Both SAS and multibeam data will be streamed in real time, allowing the research team to note targets of interest as they are passed. The survey plan aims to achieve comprehensive SAS coverage, with fill-ins as needed.

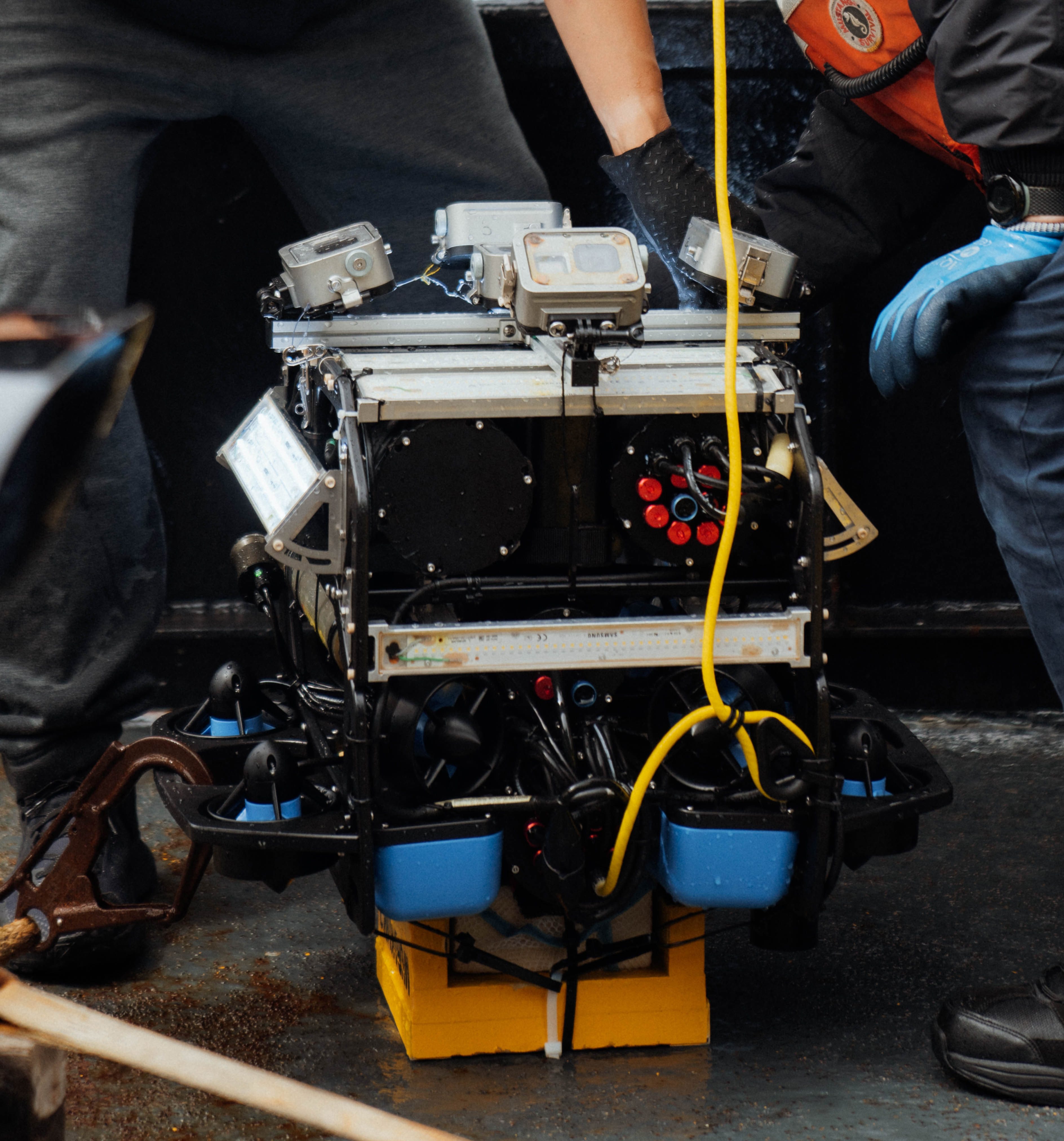
Targets of interest, especially possible shipwreck sites, will be further documented using World Scanning Project’s MURAKUMO camera system attached to a BlueROV. The assembly will be launched from the ship’s stern, with the tether cable running from through a sheath and to the control assembly. The ROV pilot will navigate using a PlayStation-like controller and the live camera feed. Visual confirmation of the target and an assessment of the ecological conditions (for example, the presence of kelp), will be made prior to deciding to proceed with a full-scale survey. The ship captain will hold the vessel above the target with the bow thrusters to avoid the ROV assembly becoming ensnared in the ship propellers. The pilot will aim for maximum coverage by executing a “lawnmower” pattern that provides for overlapping orthographic (planar) and oblique projections. Photos will be taken using time-lapse mode (0.5 per second), with all cameras appropriately calibrated. The duration of survey will be dependent on ROV battery life, target size, ambient light, sea surface conditions, and bottom current. The photos and video will not only allow the research team to visually inspect sonar targets, but may provide the necessary data to create digital, three-dimensional renderings of a site.
By Dominic Bush, Ph.D. and Jason T. Raupp, Ph.D.
Published September 26, 2024