By Tamara Frank - Halmos College of Natural Sciences and Oceanography, Nova Southeastern University

Deep Sea Systems Global Explorer remotely operated vehicle. Image courtesy of Deep Sea Systems International, Inc. Download image (jpg, 59 KB).
It’s critically important for the research on this expedition that we collect live animals in excellent condition, and Deep Sea Systems Global Explorer remotely operated vehicle (ROV) will allow us to do so.
Remotely operated means that the vehicle is tethered to the ship with a long fiber-optic cable, and operations are controlled by skilled pilots on shipboard while the ROV is deep in the ocean. About the size of a mini-van, the Global Explorer has a seven-function manipulator arm, which can be used to gently collect organisms and place them in a BioBox.

BioBox and manipulator arm on Global Explorer. Image courtesy of Deep Sea Systems International, Inc. Download image (jpg, 109 KB).
The BioBox is a temperature-insulated container, constructed of three-quarter-inch thick PVC that can be closed at depth, ensuring that organisms are being brought to the surface in cold water.
While most people think that pressure changes will kill deep-sea animals on the trip to the surface, animals that live shallower than 2000 meters handle the pressure changes quite well. The only ones living at these depths that do have problems are fish with swim bladders, as these bladders are filled with air. Animals without air-filled spaces, like fish without swim bladders, crustaceans, corals, anemones, etc., can handle the pressure, but they can’t handle the temperature changes. At their normal depths, the temperature is around 7°C (45° F), while surface waters in the Gulf of Mexico in July can be up to 30° C (86°F). This temperature shock will kill them, so the BioBox is essential to live collections of deep-sea animals.
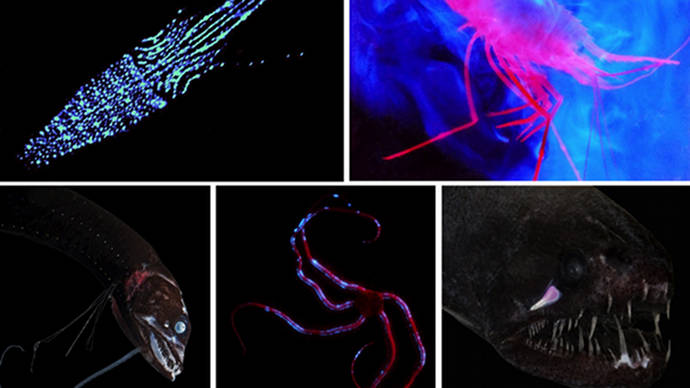
Animals that are being collected for experiments on their visual physiology also have to be collected under red light, as the bright white lights used to collect other organisms will permanently blind them. The Global Explorer has multiple lights, and two of these will be fitted with red glass filters. During collections of light-sensitive organisms, all lights other than the red lights will be extinguished. Once the animals have been placed in the BioBox in a light-tight inner container, the white lights will be turned on again for filming and collections of other organisms.
The Global Explorer has multiple camera systems, several of which will be used for different parts of the project. The 10X zoom HDTV video camera will take broadcast-quality color video from as little as 14 inches away to infinity. We will also be using the 24-megapixel digital photo camera with four laser lights for size scaling. Both of the cameras are critical for taking background images and up-close images of the animals being collected, so that we know their locations in relationship to other animals in their environment. We will also be going to several regions that have not been extensively explored, and these cameras will allow us to conduct excellent video transects in these regions.
We are extremely fortunate in that Deep-sea Systems has just added an Ikegami low light HDTV camera to their arsenal. This will allow us to take in situ video of organisms that are being stimulated to bioluminesce, either by mechanical stimulation with the manipulator, or by water currents (as we saw on the 2009 cruise). While we will be able to see the stimulated bioluminescence of these organisms in the lab, it is critically important to be able to record this bioluminescence in situ in response to both artificial (manipulator) and ambient (currents) stimulation.
In regions with bacterial mats on the seafloor, we will also be able to determine if these mats are producing a dim background glow (see Mission Plan).
The multibeam imaging sonar on the Global Explorer will also allow us to detect mounds out to 300 meters away. While we have coordinates for the locations we want to explore, placing the ship on these coordinates is one thing.Sending the ROV through 1000 to 2000 meters of water on a tether to that exact location is not that easy. The multibeam will allow us to more quickly find coral mounds and lithoherms than just using the cameras alone.