



























Figure 1. The Fetch1 autonomous underwater vehicle (AUV), like other AUVs, is a kind of taxicab for sensors. This free-swimming robot is about 2 meters (m)/6.5 feet (ft) long, weighs about 100 kilograms (220 pounds), and can go 150 m (492 ft) deep. It can cover 16 kilometers (10 miles) before its batteries need to be recharged. The data from the mission are stored on two computers inside. Click image for larger view and image credit.
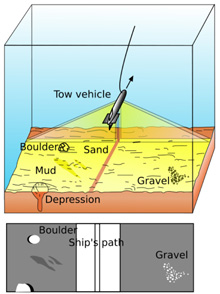
Figure 2. A side scan sonar towfish, showing the two sonar beams (top) and the resulting image created by the computer from the sonar echoes (bottom). Click image for larger view and image credit.
AUVs: Marine Science's Newest Tool
Mark Patterson
Expedition Leader — Bonaire
Associate Professor of Marine Science
Director, Autonomous Systems Laboratory
Virginia Institute of Marine Science, College of William & Mary
Arthur Trembanis
Project co-Principal Investigator
AUV Operations and Marine Geologist
Assistant Professor
University of Delaware
![]() Watch the Fetch1 autonomous underwater vehicle (AUV) sample the water column.
(Quicktime, 1 Mb.)
Watch the Fetch1 autonomous underwater vehicle (AUV) sample the water column.
(Quicktime, 1 Mb.)
Henry Stommel, an eminent oceanographer from Woods Hole, foresaw the day that there would be “a thousand swimming robots” in the sea. Autonomous underwater vehicles (AUVs) are the next big advance in tools for oceanography and national defense for several compelling reasons. AUVs can work 24/7 in conditions that keep research vessels at the dock. They provide a three-dimensional view of the water column more rapidly and less costly (by a factor of 8 to 10) as compared to ship-based surveys. They can bring sensors like side scan sonar close to the sea floor to produce superior data. And they can react to observations they make on the fly, investigate fast-changing features in the ocean, provide real-time data to ocean observing systems and their predictive models, and mitigate threats to our national security while protecting the environment.
We will be using two kinds of AUVs to map the reefs of Bonaire: one developed by Dr. Mark Patterson (the Fetch1 AUV) and two developed by Hafmynd ehf, a company in Iceland (the Gavia AUVs). One of the Gavia AUVs will be operated by Hafmynd and the other by the University of British Columbia. AUVs are taxicabs for sensors.
The Fetch1 AUV is shown in figure 1. It carries sensors to measure water quality (dissolved oxygen, pH, chlorophyll) and make images of the sea floor (using side scan sonar and underwater video). A movie of the Fetch1 AUV shows it performing a yo-yo maneuver over a coral reef in Florida (movie1auv.mov). The Gavia AUVs have similar sensors and also carry a type of sonar called multibeam, which can make images of the bottom at the same time it measures the surface topography.
Figure 2 shows the operating principle of high frequency side scan sonar. Two beams of sound travel sidewise from the body on which the transducers are mounted. The transducers both emit sound and listen to the returning echo. As the sonar travels over the bottom, it "paints" the sea floor with sound, in a line. The computer assembles the returning echoes line by line into an image that gives a two-dimensional representation of objects seen (including any acoustic "shadows" they cast). The body carrying the transducers can be towed (like the "towfish” shown in figure 2), or the transducers can be mounted on an AUV. One advantage an AUV has over a towfish is that it can swim more closely to the sea floor. This results in a superior image because the angle made by the sonar beam casts a nice shadow, showing the bottom in better relief. Another advantage is that the AUV is not connected by a cable to a ship at the surface like a towfish. If the sea is stormy, the cable pulls on the towfish and distorts the image it is trying to collect.
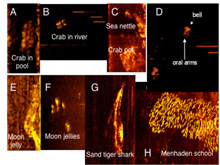
Figure 3. Examples of organisms imaged by high frequency side scan sonar. Even jellyfish and crabs can be imaged using an AUV. The side scan sonar image contains enough information for the human brain, or a trained neural network program, to recognize these fuzzy images. Click image for larger view and image credit.

Figure 4. A fun example of how the brain processes words using its own neural network classifier. Click image for larger view and image credit.
Another advantage of using side scan sonar and the related technology of multi-beam sonar is that objects not on the sea floor, but up in the water column, can be imaged, like fishes! So as the team maps the reef we hope to gain some idea of how fishes use the habitats around Bonaire. Patterson’s AUV lab at the Virginia Institute for Marine Science has already developed techniques for identifying fish (or terrorist threats) from side scan sonar images collected by an AUV. Figure 3 shows examples of how organisms that live in the water column show up on a side scan sonar image. The image gets analyzed by a computer program called a neural network which can work with fuzzy noisy images and still make an identification. This is similar to how the brain works with incomplete or noisy data. Earlier this year, the US Patent and Trademark Office issued US Patent #7,221,621 for this work. If you would like to see your own brain’s neural network classifier in action, check out figure 4. Just as the brain can still read words as long as the first and last letter is in the right place, the AUV can recognize different kinds of organisms if we train the neural network program properly. In the future, this approach may help count fish more effectively; Dr. Patterson helped develop the world’s ![]() first AUV optimized for fisheries oceanography now operated by the NOAA Southwest Fisheries Science Center. Eventually, AUVs will be used by all branches of NOAA to survey different marine environments. The NOAA Office of Ocean Exploration and Research is especially interested in seeing how well this technology performs on a coral reef.
first AUV optimized for fisheries oceanography now operated by the NOAA Southwest Fisheries Science Center. Eventually, AUVs will be used by all branches of NOAA to survey different marine environments. The NOAA Office of Ocean Exploration and Research is especially interested in seeing how well this technology performs on a coral reef.
The video images we get of the sea floor from the Fetch1 and Gavia AUVs will also help us look for new species as well as plan where we want to send our deep-diving trimix scuba divers to most efficiently use their bottom time. Here’s an ![]() example of the type of video imagery we hope to collect on this expedition. As the expedition progresses, we will be making side scan sonar, multi-beam sonar, and video imagery available in Google Earth for public use.
example of the type of video imagery we hope to collect on this expedition. As the expedition progresses, we will be making side scan sonar, multi-beam sonar, and video imagery available in Google Earth for public use.
Of course, coral reefs have interesting geology as well as biology. Dr. Trembanis' Coastal Sediment Hydrodynamics and Engineering Lab is using AUV technology to study how sea floor features can change as currents and waves move sediments around. Sediment movement and location are important to measure around coral reefs. For example, development or land-use practices ashore can affect sediment distribution and abundance on the reef. Many reef organisms, especially the corals, can be harmed if there is too much sediment present. The government of Bonaire is especially interested in investigating these processes at several locations where there is some concern about too much sediment underwater from what is happening ashore. We will be targeting our measurements at these locations to help assess what might be happening.
The sand-filled grooves between coral spur formations, and the sand plains in deeper water are also of interest to Dr. Trembanis for how sand is deposited, eroded, and moved. Understanding sediment movement can help predict whether an ancient shipwreck, or a modern-day mine, might be visible on the sea floor. The effects of currents and waves on the appearance of the sea floor in and around coral reefs is not well known. The AUVs will help Dr. Trembanis understand these processes, as will a separate set of measurements from bottom-mounted instruments that the team from Scripps Institution of Oceanography is deploying (see related essay on the physical oceanography of reefs).
Finally, in cooperation with the US Geological Survey (USGS), we will be deploying the AUVs to map the geological features at locations where there may be evidence of how Bonaire fared during some tsunamis that likely occurred 4,000 years ago. The USGS wants to understand how past tsunamis affected low-lying areas and islands so they can better assess current tsunami risks.